Политехнический музей
В.Э.Карпов
«Мобильные минироботы»
Часть I
Знакомство с автоматикой и электроникой
Методические материалы
по проведению занятий со школьниками
Москва 2009
УДК 621.865.8
ББК 32.816
Одобрено Научно-методическим Советом Политехнического музея по представлению Мироновой В.А. - заведующей научно-учебной лабораторией Робототехники и искусственного интеллекта Политехнического музея.
Карпов В.Э. «Мобильные минироботы». Ч.I. Знакомство с автоматикой и электроникой:
метод. материалы по проведению занятий со школьниками / Политехн.музей. –М., 2009. – 48 с.
Методические материалы содержат сведения теоретического и практического характера, необходимые учащимся для создания простого кибернетического устройства, решающего задачу движения по контрастной линии. Пособие рассчитано на преподавателей робототехнических курсов и кружков.
УДК 621.865.8
ББК 32.816
ISBN 978-5-98962-018-3
Ó Политехнический музей, 2009
Содержание
7. Ориентация и движение по полосе
9. Соревнования и спортивная робототехника
Лекция 2. Введение в электронику
1. Молекулы, атомы и электроны
2. Ток, напряжение и сопротивление
5. Полупроводники. Диоды и транзисторы
5. Предварительное тестирование
Приложение 1. Справочные материалы
Предисловие
Робототехника сегодня становится одним из наиболее востребованных и перспективных направлений как в научно-производственной сфере, так и в сфере образования. При этом острие исследований направлено на создание интеллектуальных роботов.
С целью популяризации робототехники и привлечения молодежи к научно-техническому творчеству в Политехническом музее с 2006 года ежегодно проводятся научно-образовательные программы: «Каникулы роботов в ПМ», «Фестиваль роботов» в рамках ежегодного Фестиваля наук и др. Обязательным элементом этих программ является выступление ведущих ученых с научно-популярными сообщениями о новых достижениях в области робототехники и искусственного интеллекта. Участниками программ являются молодежные команды-победители различных соревнований, фестивалей, выставок, олимпиад по робототехнике. Кому-то программа позволяет продемонстрировать и рассказать о своих новых разработках, для кого-то - является познавательной, а для кого-то просто яркое динамичное зрелище. Эти программы рассчитаны на все категории посетителей и вызывают большой интерес у зрителей и участников.
В Политехническом музее в 2008 году была создана Лаборатория Робототехники и искусственного интеллекта (РиИИ). Одной из главных задач лаборатории является объединение усилий ученых и исследователей, научно-технических и образовательных организаций, занимающихся интеллектуальной робототехникой. Не менее важен и такой аспект деятельности лаборатории, как работа по вовлечению молодежи в инженерно-научное творчество по созданию интеллектуальноемких технических устройств.
В лаборатории под руководством членов Российской ассоциации искусственного интеллекта создаются конструкции, предназначенные для демонстрации в музее самого интересного из того, что сейчас происходит в создании интеллектуальных мобильных роботов.
Выявилось также еще одно направление работ лаборатории РиИИ - организация занятий с детьми, желающими заниматься созданием робототехнических конструкций. Здесь задача Лаборатории заключается в разработке образовательных методик и программ, подготовке преподавательских кадров, научном и методическом руководстве.
Одна из таких методик была впервые опробована летом 2008 года, когда в рамках образовательного проекта Политехнического музея - программы «Образовательная робототехника» - был проведен ряд смен в детских лагерях. В течение смены дети изучали основы робототехники, создавая простые робототехнические конструкции. В дальнейшем работа в этом направлении была продолжена на базе созданной в музее Студии робототехники.
Программы «Образовательной робототехники» предназначены скорее для того, чтобы выявить детей, проявляющих интерес к робототехнике и с которыми в дальнейшем можно будет проводить более углубленные специализированные занятия.
Это во многом пионерская работа. Задача программы - научить детей собственными руками спаять из радиоэлементов схему управления, сделать корпус и заставить созданную мобильную конструкцию решать простые, но вполне практические задачи. Занятия рассчитаны на три цикла.
Первый цикл - «Знакомство с автоматикой и электроникой». Ребятам предстоит познакомиться с основами электроники, автоматики и робототехники на примере создания простого кибернетического устройства - маленького спортивного робота, который должен будет уметь ездить по полосе, отслеживая свое местоположение на линии.
Второй цикл - «Знакомство с микроконтроллерами и интегральной схемотехникой». В ходе обучения ребята изготовят полноценного мобильного миниробота, оснащенного микроконтроллером. Этот курс учит азам программирования, знакомит с архитектурой микроконтроллеров, командами и спецификой их программирования.
Проводится работа над введением третьего цикла занятий по теме «Спортивная робототехника». Это одна из наиболее сложных, зрелищных и интересных задач робототехники - создание спортивных роботов, участвующих в различных специальных соревнованиях.
Одним из направлений спортивной молодежной робототехники является международное движение «Евробот». В рамках этого курса юным техникам предстоит придумать и создать робота регламентов «Евробот-Юниор» и «Евробот-Стартер», вывести его на соревнования, сначала - внутренние, отборочные, а затем - на внешние…
Вашему вниманию предлагается методическое пособие по первому циклу занятий «Знакомство с автоматикой и электроникой» - Вводный робототехнический курс.
Л.М.Кожина - к.т.н., Первый заместитель Генерального директора Политехнического музея по научной работе.
Введение
Данные методические материалы рассчитаны на преподавателей робототехнических курсов. В них излагается порядок и примерное содержание лекционного материала, который должны усвоить обучаемые, а также приведено описание ряда практических занятий.
Целью курса является ознакомление с основами робототехники и создание простого робота (кибернетического устройства), решающего одну из классических задач - задачу движения по полосе. Курс является вводным и имеет прежде всего практическую направленность. Тем не менее, учащиеся должны освоить и некоторый теоретический материал.
Основная задача преподавателя заключается в том, чтобы излагаемый теоретический материал воспринимался обучаемыми не в отрыве от практических занятий, а как неотъемлемые, необходимые для применения на практике знания. Кроме того, чрезвычайно важным является то, что обучаемый должен самостоятельно (под руководством преподавателя) пройти полный цикл создания робота – от изготовления платы до его окончательной отладки.
Сохраняя общую направленность материала, определяемую предлагаемым пособием, преподаватель, естественно, должен иметь свой авторский демонстрационный материал (презентации, плакаты, раздаточный материал).
Курс рассчитан на 12 занятий по 2 часа каждое для детей от 12 лет и выше.
В зависимости от степени подготовленности учащихся, курс может быть изложен и за меньшее количество часов (зачастую много времени тратится на приобретение сугубо технических навыков – залуживание проводов, изготовление печатной платы и т.п.).
Лекция 1. Роботы
Вводная лекция. Ее задача – ознакомить обучаемых с миром робототехники, разнообразными робототехническими устройствами, дать основные определения. Основная цель – показать обучаемым, что задача, которую предстоит им решить – первый шаг на пути создания роботов.
Акцент в первой лекции должен делаться на то, что учащиеся сами могут создавать подобные описанным конструкции, совершенствовать их, участвовать в различного рода робототехнических состязаниях, фестивалях, выставках наравне как со своими сверстниками, так и более старшими коллегами.
1. Что такое робот



Ро́бот (от чешск. robota) — Автоматическое устройство с антропоморфным действием, которое частично или полностью заменяет человека при выполнении работ в опасных для жизни условиях или при относительной недоступности объекта.
2. Виды роботов
Роботы бывают разными как по своим функциям, так и по внешнему виду, элементной базе, области применения и т.п. Антропоморфность вовсе не означает, что робот должен быть похож на человека. Речь может идти о «похожести» выполнения тех или иных функций.
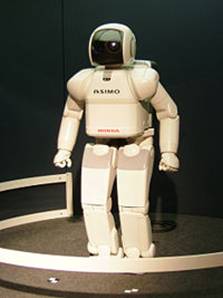
Робот-андроид ASIMO, производство Honda Робот-манипулятор

Рис. 2.1. Роботы, антропоморфные как по внешнему виду, так и по поведению
А эти устройства правильнее было бы назвать телеуправляемыми (или дистанционно управляемыми) машинами:


Луноход-1 Робот-сапер на гусеничном ходу

Робот на колесном шасси
Рис.2.2. Телеуправляемые роботы
Такие управляемые оператором машины становятся «настоящими» роботами тогда, когда они начинают действовать без участия человека.
3. Применение роботов
Военные роботы
О роботах на военной службе любят говорить журналисты. Однако зачастую к подобного рода рассказам следует относиться скептически. Ниже приведена фальсифицированная фотография робота, якобы воевавшего в рядах мексиканских повстанцев.
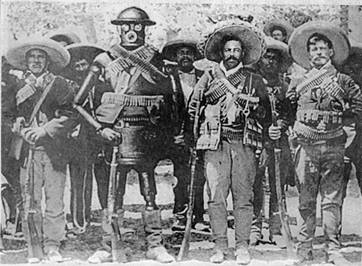
Рис.3.1. «Паровой» робот среди мексиканских повстанцев (XIX в.)
Это – пример из разряда мифов и легенд. На самом деле военные роботы выглядят гораздо менее человечно:



Рис.3.2. Современные военные роботы
Сегодня в основном речь идет лишь о телеуправляемых системах, пусть даже и таких сложных, как представленный на фотографии беспилотный робот-самолет.
Домашние роботы
Современные домашние роботы (роботы-секретари, «умные» пылесосы, роботы-сиделки и проч.) являются большей частью дорогими модными игрушками.



Робот-помощник Робот-пылесос Робот-секретарь
Рис.3.3. Домашние роботы
Существует немалое количество роботов для игр и развлечений, которых тоже можно отнести к категории «роботов для дома».
Рис.3.4. Роботы-игрушки
Спортивные роботы
Одним из наиболее эффектных и зрелищных направлений спортивной робототехники является футбол роботов. Многими специалистами утверждается, что научить машину играть в футбол гораздо труднее, чем игре в шахматы.

Рис.3.5. Роботы-футболисты
Представители ассоциация RoboCup, объединяющей создателей роботов-футболистов, заявили еще в 2000 г., что «Через 50 лет, в 2050 году, команда роботов-футболистов должна выиграть у Чемпиона мира по футболу (команды людей-футболистов)».
Помимо футбола существует множество иных состязаний роботов: робосумо, спринт, ориентирование на местности, дуэли и т.п.

Рис.3.6. Роботы-дуэлянты (Лаборатория робототехники и искусственного интеллекта Политехнического музея).
Промышленные роботы
Наибольшее распространение (и серьезнейшее практическое значение) получили промышленные роботы. Промышленные роботы обычно предназначены для выполнения узких операций, обычно монотонных и строго регламентированных. Номенклатура «специальностей» промышленных роботов включает сотни различных наименований: от роботов-сварщиков, сборщиков, маляров до роботов-такелажников и почти универсальных устройств, оснащенных техническим зрением, множеством датчиков и способных производить не только множество операций, но и адекватно реагировать на изменения в окружающем их мире.



Робот-манипулятор ТУР-10К Сборочные роботы Сварочный робот
Рис.3.7. Промышленные роботы
4. Устройство робота
Робот – очень сложная машина. Для его создания должны быть решены задачи из области механики, электроники и схемотехники, программирования и т.п.
Датчики. Робот должен иметь органы чувств (датчики). Именно датчики определяют то, насколько робот может воспринимать окружающий мир.
Исполнительные устройства (эффекторы) определяют возможность робота оказывать влияние на внешнюю среду. Это манипуляторы, двигательная система и проч.
Система управления («мозг»). Будучи сложным устройством, снабженным множеством датчиков и эффекторов и, главное, работающим в реальном мире, робот должен уметь решать сложнейшие и разнообразнейшие задачи – от управления своими отдельными органами (эффекторами) и обработки поступающей на его датчики информации до планирования своего поведения и принятия решений. Все это – задача его системы управления.
Для решения всех этих задач применяются различные методы и механизмы, и прежде всего – методы искусственного интеллекта.
5. Исследовательские роботы
Показанные выше красивые и «умные» роботы начинаются с простых исследовательских моделей. Задача этих моделей – или прототипов – отработать основные принципы, алгоритмы и методы.


Прототип робота-экскурсовода РЭКС Исследовательский робот «АМУР»
Экспериментальная платформа «ПЛУТ-1»
Рис. 5.1. Прототипы «серьезных» роботов.
А на рис. 5.2. изображен прототип оконечного комплекса датчиков для системы управления манипулятором.

Рис. 5.2. Орган управления манипулятором


Манипулятор на транспортной платформе Схват манипулятора
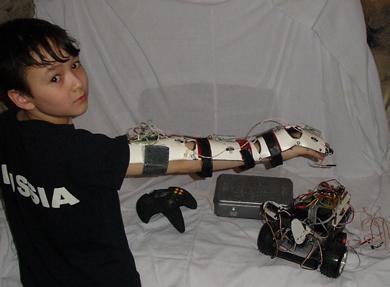
Оператор с антропоморфной системой управления
Рис. 5.3. Антропоморфная система управления манипулятором
Подобного рода прототипы систем создаются не только учеными и инженерами, но и студентами и даже школьниками.

Рис. 5.4. «Рабочее место» молодого специалиста
6. Роботы – путешественники
Существует класс роботов, которые наиболее близки к нам с точки зрения решаемой в нашем курсе задачи. Это – роботы-путешественники, задача которых - самостоятельно доехать из одной точки в другую. Маршрут может быть ограничен специальным полигоном, а может быть длиной в десятки и сотни километров.
Например, в соревнованиях IGVC устраиваются гонки по извилистой трассе с препятствиями (полностью автономное управление).
Кроме того, роботы должны выполнять определенные задания, связанные с навигацией с помощью системы глобального позиционирования (GPS). К каждому роботу прицеплен груз. Задача - доставить его в определенные точки, отмеченные на карте.


Рис.6.1. Соревнования IGVC
В соревнованиях DARPA Grand Challenge требовалось пройти маршрут длиной около 200 км. Участие человека, естественно, должно быть исключено.


«Реальный» маршрут

Роботизированный автомобиль
Рис.6.2. Соревнования DARPA Grand Challenge
Задача создания таких роботов очень сложна. Естественно, что ее решение тоже начинается с более простых моделей.
7. Ориентация и движение по полосе
Одной из таких моделей является решение задачи движения робота по специальному искусственному полигону. На полигоне расположены маяки, а сам полигон представляет собой шахматное поле.

Рис. 7.2. Полигон
Существует совсем простой вариант полигона, на котором нарисована простая линия и задача робота – проехать по ней максимально быстро. Это – уже вполне посильная для начинающих задача.


Рис. 7.2. Заезды роботов по простой линии

Рис. 7.3. Исследовательские роботы АМУР на инверсной полосе
8. Содержание курса
Задача нашего курса состоит в том, чтобы научиться решать именно эту простую задачу – создать устройство, которое должно уметь ехать по контрастной линии.



Внешний вид системы управления и робота
Для создания такого внешне простого устройства надо научиться многому. Предполагается, что по окончании курса обучаемый должен будет знать:
- теоретические основы простейшей элементной базы;
- элементарную механику и конструирование;
- основы схемотехники.
Кроме того, обучаемому предстоит освоить ряд практических навыков, таких, как:
- практические навыки работы с паяльником, слесарным и электро- инструментом;
- простейшие технологии производства печатных плат;
- работу с простейшими измерительными приборами.
9. Соревнования и спортивная робототехника
В конце курса предполагается проведение соревнований созданных роботов. Цель соревнований – как можно быстрее проехать по полосе. Полоса – это черная линия шириной 5 см.
Примечание. Далее преподавателю следует будет рассказать о различного рода соревнованиях, таких, например, как Евробот, Робототехнический турнир на кубок Политехнического музея и проч. Желательно показать разнообразные фотографии и видеоролики.

Рис.9.1. Полигон соревнований Евробот
Обратите внимание на то, что и в этих соревнованиях имеется задача движения робота (т.н. «автономной части») по полосе.
Лекция 2. Введение в электронику
1. Молекулы, атомы и электроны
Примечание. Учащимся напоминаются основы строения вещества: молекулы, атомы, строение атома.
Простоты ради будем полагать, что атом – это положительно заряженное ядро и вращающиеся вокруг ядра электроны, несущие отрицательные заряды, рис.1.1.
 Рис.1.1. Строение вещества
Рис.1.1. Строение вещества
Электроны обычно считаются «привязанными» к ядрам. Здесь хорошо воспринимается аналогия с родителем (ядро, большое и положительное), держащим за руки детей (электроны, маленькие и отрицательные), рис.1.2.

Рис.1.2. Ядро, удерживающее свои электроны
Существуют вещества, в которых имеются свободные заряды (аналогия с детской площадкой, где сидят родители, а вокруг снуют дети (электроны), рис.1.3).
Рис.1.3. Хаотично движущиеся электроны
Однако стоит приложить т.н. электрическое поле, то свободно и хаотично движущиеся заряды (электроны) начнут двигаться в одном направлении (аналогия с детьми, которым дали мяч и которые побежали в одну сторону. Или подул ветер и всех детей стало сносить).
Рис.1.4. Направленное движение зарядов
Это движение заряженных частиц и есть электрический ток. Разумеется, определение электрического тока – это дело сложное. Здесь бы надо помнить о протекании тока в газах, в жидкостях и т.п., однако базовое – инженерное - представление может быть и таким.
2. Ток, напряжение и сопротивление
Итак, ток – это упорядоченное движение зарядов.
Основными понятиями являются напряжение, сопротивление и собственно сила тока.
Можно провести аналогию между током и течением жидкости или движением сыпучего вещества. Продолжая аналогию, можно пояснить, что чем выше мы поставим резервуар с водой, тем сильнее будет ее напор. Эта высота и есть аналог электрического напряжения.
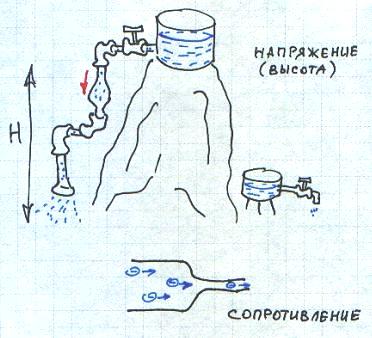
Рис.2.1. Напряжение, ток и сопротивление
Чем шире труба, тем легче жидкости (или сыпучему веществу) течь. Ширина трубы определяет сопротивление.
Ток, напряжение и сопротивление связаны между собой законом Ома.
![]() или
или
![]()
Ток измеряется в Амперах [A], напряжение – в Вольтах [В], сопротивление – в Омах [Ом]. Ампер, Вольта, Ом – все это фамилии ученых, физиков, в честь которых и названы эти физические величины.
3. Источники электроэнергии
Далее надо показать порядок величин, дабы можно было прочувствовать, что такое вольт и ампер. С вольтами просто. Есть розетка, где 220 В и это опасно для жизни; есть батареи и элементы питания, которые можно попробовать «на язык».
Рис.3.1. Источники электроэнергии
С амперами сложнее. Например, ток, необходимый для того, чтоб заработал электродвигатель от игрушечной машины - это 0.5 А. А чтобы запустить стартер автомобиля, требуется около 50 А.
4. Язык схем
В этом и последующих курсах мы будем собирать различные схемы, соединять между собой детали, элементы и прочее. Разумеется, надо уметь описывать эти схемы, то, какие и каким образом детали должны соединяться, припаиваться и прикручиваться.
Для этого описания вполне возможно использовать рисунки. Скажем, на рис. 4.1а изображена простая схема с батареей, лампочкой и выключателями, а на рис. 4.2б – уже более сложная схема.
Рис. 4.1. Простые схемы-рисунки
На рис. 4.2 изображена основная схема курса – один каскад системы управления.
Рис. 4.2. Схема-рисунок системы управления
Очевидно, что рисовать такие схемы тяжело. Зачастую в таких схемах-рисунках остаются непонятные места, плохо или небрежно прорисованные элементы, которые будут вводить в заблуждение.
Надо сказать, что раньше, лет 100 назад, именно таким образом и рисовались схемы, однако очень быстро инженеры поняли, что так дело не пойдет и придумали свой язык – язык электрических схем, где специальным образом изображаются элементы и детали. Эти схемы были уже не столь красивы, как рисунки, однако гораздо более понятны и просты.
Ниже приведены примеры схем и рисунков. Они достаточно очевидны и ясны.
Рис. 4.3. Простые рисунки и схемы
А вот так обозначаются некоторые основные элементы схем:
Такие схемы называются электрическими принципиальными схемами.
И, наконец, еще раз приведем нашу основную схему и соответствующий ей рисунок:
Рис. 4.4. Схема электрическая принципиальная каскада управления и его рисунок
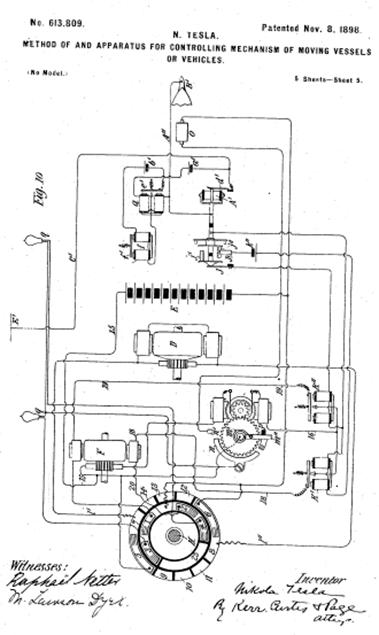
Заканчивая разговор о языке схем, предлагается полюбоваться схемой знаменитого Николы Теслы, которую он разработал в 1898 г. Обратите внимание, насколько тщательно и наглядно изображены некоторые ее элементы, хотя часть деталей нарисованы в уже привычной нам «современной» форме.
5. Полупроводники. Диоды и транзисторы
Мы уже говорили о том, что есть вещества, которые пропускают электрический ток – проводники, - и вещества, не пропускающий ток – диэлектрики. У проводников молекулы и атомы устроены таким образом, что электроны находятся в «свободном» состоянии, т.е не «привязаны» к одному и тому же месту. Поэтому, когда мы прикладываем электрическое поле, электроны начинают движение – начинает течь ток. У диэлектриков картина иная – электроны жестко привязаны к своим «хозяевам», поэтому «сдвинуть» их с места тяжело.
Однако существует класс веществ, у которых с электронами дело обстоит гораздо интереснее. Они называются полупроводиками, т.е. вещества и материалы, которые вроде проводят электрический ток, а вроде и не проводят.
Напомним еще раз, что и ядро атома, и электроны, вращающиеся вокруг ядра, являются заряженными частицами. Ядро заряжено положительно, а электроны несут отрицательные заряды. При этом количество положительных и отрицательных зарядов равны, т.е. в целом получается нуль и у каждого атома должен быть «полный комплект» электронов.
Однако одни полупроводники устроены таким образом, что если до этого полного комплекта атому недостает одного-двух электронов, он их охотно присвоит. А если на наружной орбите электронов «мало», то атом «предпочтет» отпустить их «на свободу», превратившись в т.н. положительный ион.
В зависимости от того, «отпускает» ли атом электрон или, напротив, забирает его себе, полупроводники делятся на 2 типа: n-полупроводники и p-полупроводники.
Когда атомы полупроводника «отпускают» электроны, то именно эти электроны при воем движении образуют ток. Это – n-полупроводники (от negative – отрицательный, т.к. заряд электрона отрицателен).
Немного сложнее ситуация, когда атом «забирает себе электрон». Забрав электрон, атом становится нейтральным, количество положительных и отрицательных зарядов уравновешивается. Но ведь откуда-то этот электрон был забран, значит в том месте, где был этот забранный электрон, заряда стало не хватать, баланс нарушается и атом с «похищенным» электроном будет уже не нейтральным, а положительно заряженным. Образовалась т.н. «дырка», причем положительно заряженная. Эти «дырки» и становятся носителем тока. Нам ведь главное, чтоб было движение зарядов, а уж настоящий ли это заряд – электрон – или «фиктивный» – дырка – не существенно. Такие «дырочные» полупроводники называются p-полупроводниками (от positive – положительный).
Возникает закономерный вопрос: откуда берется нехватка или избыток этих самых электронов, ведь в веществе все уравновешено. На самом деле речь идет о том, что в этом виноваты примеси. К примеру, есть такое вещество, которое называется германием. На наружной орбите атома кристалла германия «обитают» четыре электрона, т.е. как раз половина «комплекта». При этом наружная орбита каждого атома как бы «переплетается» с орбитами четырех соседних атомов, т.е. внешние электроны становятся «общими» для нескольких атомов. Но если внутрь кристалла германия проникнет чужеродный атом примеси, у которого на наружной орбите будет не 4, а 5 электронов, то этот пятый атом окажется «не у дел». Это и будет избыточным зарядом, который сможет переносить электрический ток. Мы получаем n-полупроводник.
Примерно так же будет обстоять дело в том случае, когда в качестве примеси будет использоваться вещество, атомы которого будут содержать не 4, а 3 электрона. Тогда кристаллу придется «отдавать» свои электроны и возникнет дырочная проводимость.
Диод
Самое интересное начинается тогда, когда мы берем два разных полупроводника (p- и –n) и соединяем их вместе. Полученное устройство называется диодом. Диод интересен тем, что пропускает ток только в одном направлении.
Это можно объяснить так.
Когда мы прикладываем плюс к p-полупроводнику, а минус – к n-полупроводнику, то свободные положительные заряды (дырки) устремляются к минусу, а отрицательные (электроны из n-части) – к плюсу. Т.е. все заряды устремляются в нужную им сторону и течет ток, см. рис. 5.1а.
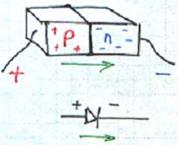
а) б)
Рис.5.1. Диод
Иное дело, если изменить полярность. Тогда немногочисленные дырки (p) оттянутся к минусу, а свободные электроны (n) – к плюсу. При этом на границе p-n-перехода возникнет потенциальный барьер. Этот барьер не даст зарядам течь, рис.5.1.б.
Рис. 5.2. Прямое и обратное включение диода
Обратите внимание на то, как изображается на схеме диод. Он, действительно, похож на стрелку, указывающую, куда должен течь ток.
Транзистор
Еще интереснее ситуация, когда мы спаиваем 3 полупроводника, так, как показано на рис. 5.3.
Рис. 5.3. Транзистор и его обозначение
У транзистора три вывода, которые называются эмиттер, база и коллектор. Это действительно уникальный по своим возможностям прибор. Дело в том, что транзистор умеет усиливать электрические сигналы.
Предположим, что у нас есть мощный источник – аккумулятор. Подключим его так, как показано на рис. 5.4.
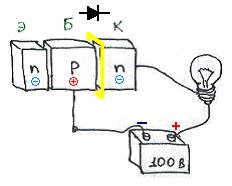
Рис. 5.4. Подключение транзистора
Лампа не загорится, т.к. мы включили транзистор «не в том направлении». Это действительно похоже на включенный в обратном направлении диод. На рисунке изображен образовавшийся потенциальный барьер, мешающий течению тока.
Но ситуация поменяется, когда мы подключим между эмиттером и базой маломощный источник. Причем подключим его в прямом направлении. Через транзистор потечет ток и лампа зажжется, рис.5.5.
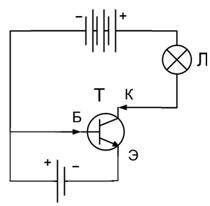
Рис. 5.5. Подключение транзистора
Произошло следующее. Малого тока, текущего через базу и эмиттер, хватило для того, чтобы устранить потенциальный барьер между базой и коллектором. Транзистор открылся. Обратите внимание на то, что в этом и заключается усилительный эффект транзистора: малого тока достаточно для того, чтоб транзистор стал пропускать большой ток.
Транзисторы бывают разными. В одних соединяются полупроводники n-p-n, как было показано выше, у других – наоборот – p-n-p. Бывают транзисторы, предназначенные для работы с большими токами – до нескольких ампер, бывают маленькие, рассчитанные на слабые токи (зато они имеют большой коэффициент усиления). Но все они имеют по три вывода – базу, коллектор и эмиттер.
Рис. 5.6. Различные виды транзисторов
Кстати, первый усилительный полупроводниковый прибор был создан еще в 1924 г. Лосевым О.В., сотрудником Нижегородской лаборатории Бонч-Бруевича. К сожалению, в те времена ламповые приборы гораздо лучше справлялись со своими задачами и открытие было забыто на многие годы. Лишь в 1948 г. произошло его «переоткрытие».
Маркировка транзисторов (цоколевка). Транзисторов существует великое множество, да еще у каждого есть база, коллектор и эмиттер, которые могут располагаться совершенно по-разному. Для того чтобы не перепутать выводы, существуют справочники, в которых и описывается их расположение. Это описание называется цоколевкой транзистора.
Б – база, К – коллектор, Э – эмиттер
Рис. 5.7. Примеры цоколевки транзисторов
Запоминать цоколевку транзисторов не обязательно. Иногда это даже вредно, т.к. все равно перепутаете. При работе необходимо пользоваться справочниками и только ими, не полагаясь на память и слова ваших коллег.
6. Система управления
Примечание 1. Этот раздел учащиеся начинают после проведения ряда практических занятий по схемотехнике с конструкторами типа «Знаток».
Теперь, зная, как работают диоды и транзисторы, перейдем к рассмотрению нашей основной схемы – системы управления роботом. Схема состоит из двух одинаковых частей – для левого и правого двигателей, поэтому ограничимся приведением лишь одной из них. На нашей схеме элемент Rф обозначает либо фототранзистор, либо фотодиод, либо фоторезистор – некий элемент, у которого при попадании света уменьшается сопротивление.
Рис. 6.1. Схема системы управления
Схема состоит из двух частей – усилителя на транзисторе КТ3102 и ключа – транзистора КТ829.
Работает она так. Когда фотоэлемент Rф не освещен, сопротивление его велико, ток через него не течет. Когда же на него попадает свет, то сопротивление уменьшается и через него начинает течь ток. Через подстроечный резистор R2 ток течет на базу транзистора Т1. Транзистор Т1 (КТ3102) имеет большой коэффициент усиления. Этого слабого тока достаточно для того, чтобы транзистор открылся и стал пропускать через себя уже более серьезный ток. У этого транзистора большой коэффициент усиления – от 100 до 500, т.е. через его коллектор может пройти ток, который в эти 100 или 500 раз больше, чем ток, поступающий от фотодатчика на базу.
Так работает усилительный каскад. К сожалению, пропускаемого через Т1 тока не хватит для того, чтобы завести электродвигатель (максимум, что можно выжать из этого транзистора – 100 мА (0.1 Ампера), тогда как двигателю нужно около 500 мА.
Для этого и делается вторая часть – ключ.
Тока усилителя хватает для того, чтобы открыть ключевой транзистор – Т2. Транзистор Т2 (КТ829) – это уже «серьезный» прибор. Он может пропускать ток уже в несколько ампер, чего с лихвой хватает для нашего двигателя. Когда транзистор Т2 открывается, через него и двигатель начинает течь ток, т.е. двигатель запускается.
Когда же количество света, попадающего на Rф уменьшается, то его сопротивление начинает возрастать, ток через Rф уменьшается, уменьшается ток через Т1 и, соответственно, уменьшается ток, пропускаемый транзистором Т2. Двигатель начинает вращаться медленнее.
Таким образом, эта схема заставляет двигатель вращаться со скоростью, определяемой освещенностью фотоэлемента.
Примечание 2. Крайне желательно, чтобы эту схему и принцип ее работы учащиеся выучили наизусть.
Примечание 3. В принципе, усилительный каскад в этой схеме необязателен. Возможностей транзистора КТ829 вполне хватает для того, чтобы схема заработала. Просто это – учебная схема и зачастую без предварительного усиления не обойтись.
Примечание 3. На самом деле «усилительная» часть схемы представляет собой т.н. эмиттерный повторитель. Эмиттерный повторитель имеет наибольшее входное сопротивление и наименьшее выходное и используется для усиления сигнала по току. Дело в том, что в такой схеме напряжение на эмиттере почти такое же, что и на базе, т.е. здесь транзистор повторяет напряжение (за вычетом напряжения, теряемого на переходе). При этом происходит усиление сигнала по току и, следовательно, усиление мощности.
Использование схемы делителя напряжения приводит к тому, что ток, поступающий на базу транзистора, очень мал, и потому его необходимо усиливать. У КТ3102 hоэ=200¸800 (здесь, повторим, коэффициент усиления по напряжению близок к единице).
Примечание 4. При крайнем положении регулятора подстроечного резистора R2 и малом сопротивлении Rф ток через Т1 будет слишком велик и транзистор может выйти из строя. Во избежание этого полезно ограничить ток, подаваемый на базу транзистора Т1. Для этого можно включить сопротивление номиналом 500 Ом либо между Rф и R2 (точка a1 на рис.6.2.), либо базой Т1 и центральным выводом R2 (точка a2).
Рис. 6.2. Включение ограничивающих резисторов
Лекция 3. Датчики
1. Органы чувств робота
Можно сказать, что робот – это система, оснащенная эффекторами (исполнительными устройствами), рецепторами (датчиками) и, естественно, системой управления. В нашем проекте эффекторами робота являются двигатели и излучатели (подсветка датчиков). Правда, излучателями мы управлять не умеем, так что они «не совсем считаются».
Рецепторами или датчиками у нас являются фотоэлементы, а схему системы управления мы рассматривали выше.
Разумеется, чем больше будет у нас эффекторов, тем больше робот будет уметь совершать различных действий, а чем больше датчиков, тем больше информации об окружающем мире сможет воспринимать робот. Правда, за такое «богатство возможностей» надо платить усложнением системы управления.
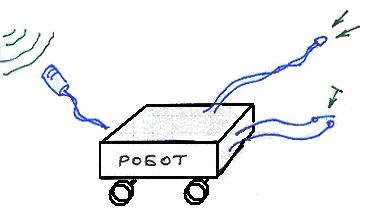

Рис.1.1. Робот как система «эффекторы + рецепторы + система управления»
В качестве рецепторов робота можно использовать самые разнообразные устройства. Можно использовать фотодатчики, и тогда робот будет реагировать на свет. Можно подключить простейший контактный датчик, и тогда робот будет реагировать на прикосновение. Можно использовать микрофон, и тогда наша система будет реагировать на звук.
Рассмотрим далее более подробно некоторые наиболее простые и часто встречающиеся виды датчиков.
2. Контактные датчики
Это – самый простой тип датчиков. В качестве датчика может использоваться кнопочный переключатель или «усы», построенные из упругой проволоки. Задача этого датчика – замкнуть контакты при касании, скажем, препятствия.
3. Резистивные датчики
Начнем с «обычных» резисторов (сопротивлений). Изготавливаются они так. Берется материал (проводник), который не очень хорошо проводит электрический ток. Это может быть проволока, это может быть некий нанесенный на подходящую поверхность слой материала (резиста). Эти резисторы могут быть совершенно разными и по конструкции, и по используемому резисту, и по мощности, и, конечно, по своему сопротивлению - номиналу.
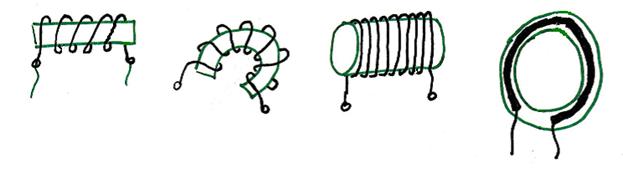
Рис. 3.1. Резисторы
Но общее у них одно: у них имеются два вывода, а на схеме они, напомним, обозначаются так:
Теперь добавим еще один вывод – скользящий контакт. Тогда, в зависимости от того, в каком положении находится этот контакт (близко или далеко от края), сопротивление между ним и крайним контактом будет меняться. Двигая ползунок ближе к какому-либо контакту, мы будем уменьшать сопротивление, а отодвигая дальше – увеличивать.
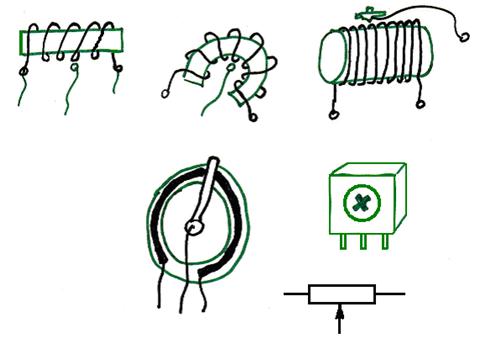
Рис.3.2. Переменные и подстроечные сопротивления
Существует множество типов подобного рода устройств, а условное обозначение их таково:
Примечание. Различают подстроечные и переменные резисторы. Переменные резисторы делаются такими, чтоб их можно было удобно и постоянно крутить. Подстроечные, напротив, регулируются редко. После регулировки их стараются зря не трогать.
Итак, взяв такой переменный резистор и включив его в схему, мы сможем определять, в каком положении находится центральный контакт (вращающаяся ручка, ползунок и т.п.), т.к. от его положения зависит сопротивление, а уж его-то мы измерить можем.
4. Емкостные датчики
Есть очень интересная деталь, называемая конденсатором. Конденсатор (или, по-русски – собиратель) – это две металлические пластины, между которыми находится изолятор (главное, чтоб они не соприкасались и между ними не шел ток. Если пластины достаточно велики и расположены друг напротив друга на небольшом расстоянии, то такое устройство будет способно накапливать и хранить электрический заряд.
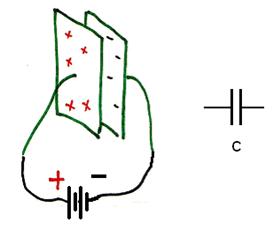
Рис.4.1. Конденсатор и его условное обозначение
Конденсаторы (еще их называют ёмкостями) обычно не делают из плоских пластин. Чаще всего берут две тонкие полосы металлической фольги, между ними кладут изолирующий материал, а затем скручивают в трубочку, рис.4.2.
Рис.4.2. Конденсаторы
Но нас интересуют прежде всего не свернутые в трубочку полосы фольги, а именно пластины. Дело в том, что емкость конденсатора, т.е. способность накапливать электрический заряд, зависит от очень многих факторов. Основными из них является расстояние между пластинами, то, насколько они перекрывают друг друга, а так же то, что находится между ними.
Рис.4.3. Пластины конденсатора, между которыми находится предмет
Изменяя эти величины, т.е. меняя расстояние между пластинами или их взаимное расположение, или помещая между ними какие-либо предметы, мы сможем замерить количество накопленного на пластинах конденсатора заряда, т.е. измерить его – конденсатора – емкость. А коли мы можем измерить эту величину, то мы получаем не что иное, как датчик.
5. Фотодатчики
Основными датчиками в нашем курсе являются фотодатчики. Фотодатчик состоит из двух элементов – светодиода для подсветки (вместо светодиода можно использовать и лампу накаливания) и фотоэлемента – фотодиода, фототранзистора или фоторезистора.
Со светодиодом для подсветки все просто. Его задача – просто светить. А фотодиод должен ловить отраженный свет. В зависимости от освещенности, фотодиод меняет свое сопротивление. В отличие от фоторезистора, который все равно в каком направлении включать, фотодиод пропускает ток лишь в одном направлении (если его осветить). Поэтому следует соблюдать порядок включения фотодиода.
Излучающий светодиод также должен быть включен в нужном направлении, рис.5.1.
Рис.5.1. Фотодиод (фототранзистор) и светодиод
При конструировании датчика полосы берутся излучатель (светодиод) и приемник (фотодиод). Они располагаются так, чтобы свет излучателя, отразившись от поверхности, попадал на приемник, рис. 5.2.
Рис.5.2. Расположение излучателя и приемника
Если поверхность светлая, то лучи отразятся от нее и попадут на фотодатчик. Сопротивление его уменьшится, откроется транзистор и т.д. и т.п. Если датчик находится над черной полосой, то от темной поверхности отражение будет слабым и фотодатчик толком ничего не увидит.

Рис.5.3. Датчики полосы на роботе
При изготовлении датчиков следует обратить внимание на два очень важных момента.
1. Чтобы не реагировать на неизбежное внешнее освещение, фотодиод должен находиться в тени. Тень создается большой пластиной, на которой и крепятся излучатель и приемник.
2. Излучатель и приемник монтируются так, чтобы пятно света от излучателя находилось прямо под приемником.
Несоблюдение этих условий приведет к тому, что датчики будут либо сильно засвечиваться внешними источниками и робот перестанет реагировать на черную линию, либо, при неудачном взаимном расположении, робот просто ничего не будет видеть.
6. Подключение датчиков
Мы рассмотрели лишь малую часть того, как могут выглядеть датчики. Существуют датчики температуры, датчики ускорений, веса, направления… Но самое интересное заключается в том, что многие из этих датчиков можно легко подключить к нашей схеме.
Если вместо фотодиода включить термодатчик, то скорость вращения двигателя будет зависеть от температуры; подключив контактный датчик, получим систему, реагирующую на прикосновение (убегающего от препятствия или наоборот).
Рис.6.1. Подключение различных датчиков к схеме
Иными словами, мы имеем достаточно универсальную систему, с которой можно проводить множество экспериментов. Основное требование к подключаемым датчикам заключается в том, что они, в зависимости от своего назначения, должны изменять свое сопротивление.
Практические занятия
Описываемые ниже практические занятия рассчитаны на создание робота по простейшей, базовой технологии. При наличии иных материалов и комплектующих содержание их может, естественно, изменяться.
1. Основы электроники
Учащиеся работают с конструктором «Знаток», начиная с простейших схем. Цель занятий заключается прежде всего в закреплении полученных теоретических сведений.
Особое внимание следует уделить схемам с фотоэлементами и составными транзисторами.
2. Печатная плата
Изготовление печатной платы заключается в подготовке основы, нанесения рисунка и последующего травления.
Плата изготавливается из фольгированного стеклотекстолита. Края заготовки печатной платы требуется обработать напильником. Далее плата (фольга) тщательно отмывается пемолюксом. Использование порошкового пемолюкса обеспечивает как обезжиривание поверхности фольги, так и ее мелкоабразивную обработку.
Шаблон может представлять собой рисунок, распечатанный на лазерном принтере. Шаблон печатается либо на фотобумаге, либо на плотном глянцевом картоне. Хорошие результаты дает фотобумага Epson S041140 или аналогичная (глянцевая, плотность - 194 г/м2).
Для нанесения рисунка шаблона на плату используется утюг. Не забудьте подложить под плату несколько газет для создания амортизирующего слоя.
Рис. 1. Печатная плата
Температура утюга – 200о C. Прогревать следует равномерно, избегая боковых смещений утюга во избежание расплывания рисунка.
После тщательного и равномерного прогрева шаблон должен стать желтого цвета. Далее пинцетом плата опускается в емкость с водой. После отмокания и снятия шаблона надо внимательно проверить получившийся рисунок.
В случае необходимости следует дорисовать неполучившиеся участки. Кроме того, все платы должны быть подписаны учащимися (чтоб не перепутали в дальнейшем). Нанесение рисунка (исправление) и подписи делаются двумя перманентными спиртовыми маркерами – черным и иного, светлого цвета. Сначала делается надпись (исправление) светлым маркером (синим, красным или зеленым), а затем, поверх, - черным. Это гарантирует нанесение двойного слоя рисунка.
Далее плата помещается в насыщенный раствор хлорного железа. Для удобства работы рекомендуется приклеить полосу скотча к обратной стороне платы, чтоб можно было вытаскивать из раствора плату за этот «хвост».
3. Работа с паяльником
Это занятие начинается с изложения техники безопасности. При работе с паяльником учащиеся должны четко понять, зачем нужен флюс (рекомендуется канифоль и ЛТИ-120), для чего следует предложить им сначала поэкспериментировать и нанести припой на провод без флюса.
Очень хорошим упражнением является изготовление кубика из толстой медной проволоки (длина грани порядка 5 см.)
После изготовления кубика можно предложить подготовить монтажные провода. Для нашего проекта требуется около 6-7 пар проводов МГТФ длиной 20-25 см.
Далее происходит залуживание дорожек платы с последующим сверлением отверстий (0.85 – 1 мм).
4. Монтаж схемы
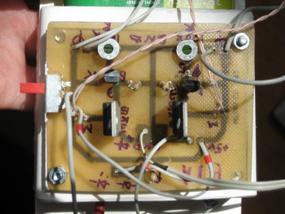
Изготовление базовой схемы начинается с подготовки к монтажу - разрисовыванию платы и маркировки транзисторов. Для этого рекомендуется использовать сборочный чертеж.
Рис. 2. Сборочный чертеж
R1 - 1 кОм, R2* - 100 кОм, R3 - 500 Ом, T1 - КТ3102, T2 - КТ829

Рис.3. Внешний вид платы
После маркировки платы требуется промаркировать выводы транзисторов, используя разноцветный кембрик или термоусадочную трубку (база – белый цвет, коллектор – красный, эмиттер – какой-нибудь иной – зеленый, например). По такому же принципу маркируются в дальнейшем выводы диодов и провода питания.
Система питания представляет собой батарею на 4.5 В, выключатель и провода с клеммами для подключения к батарее.

Рис.4. Вариант подключения батареи
Если нет готовых клемм (например, автомобильных), то их можно изготовить из канцелярских скрепок.
5. Предварительное тестирование
Схема собирается почти полностью, за исключением фотодатчиков. Фототранзисторы припаиваются к проводам в самом конце.
Предварительное тестирование заключается в т.н. проверке на «закорот», при которой накоротко соединяются провода, к которым должны быть припаяны фототранзисторы. При таком закороте соответствующий двигатель должен заработать.
При отсутствии реакции нужно сначала попробовать покрутить подстроечный резистор.
Внимание! При регулировке и эксплуатации схемы нельзя, чтобы подстроечный резистор находился в крайнем положении. При необходимости подстроечник вращается до упора в нужную сторону, а затем «чуть-чуть» возвращается назад.
После предварительного тестирования схемы (без датчиков, с закоротами) припаиваются выносные элементы – фототранзистор и излучатели.
6. Корпусные работы
Корпус изготавливается из пластика. Для его изготовления требуются резак, линейка, паяльник, чтоб прогревать места сгиба, и клеящий термопистолет.
Пластик режется канцелярским ножом с использованием металлической линейки или уголка (чтоб не порезаться). Для начала делается несколько осторожных надрезов, а затем с каждым разом давим на резак все сильнее.
После вырезания прямоугольного основания робота изготавливается П-образный отсек для батареи. Наверху этого отсека крепится плата регулятора.
Батарейный отсек приклеивается к основе с помощью термоклея.
Бескорпусные устройства. Проще всего делается робот, у которого верхняя часть батарейного отсека служит для установки платы системы управления.




Рис.5. Бескорпусные роботы
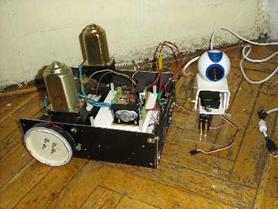
Корпус "закрытого" типа. Закрытие платы системы управления защищает электронику робота от внешних воздействий, однако может затруднить доступ к подстроечным резисторам для регулировки чувствительности фотодатчиков.


Рис.6. Корпусные роботы
Установка двигателей
Двигатели приклеиваются термоклеем так, чтобы оставался дорожный просвет около 5 мм, а угол наклона составлял около 45°.

Рис.7. Крепление двигателей
На оси двигателя плотно наматываются несколько витков изоленты для уменьшения проскальзывания (это – «шины» робота). Можно также использовать резиновую трубку подходящего диаметра (например, трубка ниппеля от велосипедного золотника), а также колпачки от гелиевых стержней (MyRobot.ru).
На самом деле, конструкция робота может быть весьма произвольной и зависит от фантазии учащихся и элементной и конструктивной базы. Например, широко могут использоваться различные конструкторы, готовые мотор-редукторы (от игрушечных машин) и проч. В частности, неплохие результаты показывают устройства, использующие 4 двигателя и установленные на раме, собранной из металлического конструктора (MyRobot.ru).
7. Сборка робота
Окончательная сборка робота заключается в креплении датчиков и схемы управления. При монтаже датчиков следует использовать «козырек» из пластика (он же является несущей конструкцией). Козырек должен обеспечивать нахождение фототранзистора в тени, во избежание попадания внешнего света на фоточувствительные элементы.
В зависимости от решаемой задачи, датчики устанавливаются следующим образом:
а) для движения по черной линии б) для движения по белой линии
Рис. 8. Расположение датчиков относительно линии
Расположение элементов датчиков
Рис. 9. Расположение излучателя и приемника
Расстояние между датчиками - 70-75 мм.
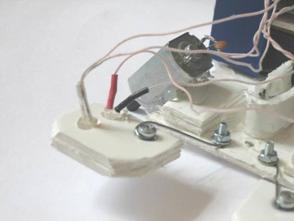

Рис. 10. Внешний вид датчиков. Варианты крепления
8. Наладка
Наладка заключается в регулировке чувствительности датчиков и регулировке взаимного расположения фототранзистора и светодиода. Световое пятно от излучателя должно располагаться под фототранзистором.
Сначала робот устанавливается на светлую поверхность. При этом он должен двигаться прямо. Затем робот устанавливается так, чтобы оба датчика находились на темной полосе. Двигатели при этом работать не должны.
Не допускайте установки крайнего положения подстроечных резисторов (правило «крутить до упора и затем - чуть-чуть обратно»).
При наладке ходовой части требуется либо плотно обмотать оси двигателей несколькими витками изоленты, либо использовать резиновую трубку подходящего диаметра. Наладка заключается в подборе толщины наматываемой изоленты.
9. Дополнение
В том случае, если учащийся создал работоспособную систему и у него осталось время, можно предложить модернизацию робота для решения аналогичной задачи – движения на свет.
Для поиска источника света требуется переориентация датчиков по ходу движения и установка переборки (из пластика) между датчиками.
Заезды рекомендуется производить в темноте (ориентированные по ходу движения датчики не должны засвечиваться внешним освещением). В качестве источника может использоваться либо маломощная лампа накаливания, либо свеча.
10. Соревнования
Подготовка к соревнованиям
Подготовка робота к соревнованиям заключается в совершении пробных заездов и окончательной регулировке чувствительности датчиков и их взаимного расположения. Кроме того, желательно разместить батарею как можно ближе к двигателям для лучшего сцепления их осей с поверхностью.
Оформление роботов внешнего вида роботов определяется исключительно вкусом и представлениями авторов.
Соревнования
Полигон для соревнований представляет собой прямоугольную поверхность (лист оргалита, баннерная ткань и т.п.) белого цвета. Трасса может представлять собой замкнутую кривую – черную линию шириной 5 см. Желательно выдерживать минимальный радиус кривизны линии порядка 20-30 см.
При проведении соревнований проводятся несколько заездов для каждого робота, определяя в зачете лучшее время.
Приложение 1. Справочные материалы
Транзисторы КТ3102 и КТ829 (или их аналоги) могут быть с любым буквенным индексом. Цоколевка этих транзисторов приведена ниже.
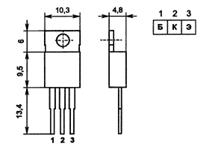
КТ3102 КТ829
В качестве фоточувствительного элемента рекомендуется использовать фототранзисторы с максимально широким диапазоном чувствительности. Например, фототранзистор BPW85C (620..980 нм).
В качестве излучателей можно использовать светодиоды красного или ИК-диапазона:
L-1543SRC-D светодиод красный d=5мм 900мКд
либо
L-53SRD-G светодиод красный d=5мм 900мКд
Крайне удобными бывают светодиоды со встроенными сопротивлениями
L934-5v (3 или 5мм)
При их использовании можно обойтись и без ограничивающего сопротивления R3.
Приложение 2. Программа курса
Мобильные минироботы. Часть 1. Знакомство с автоматикой и электроникой
12 занятий.
Продолжительность занятия - 120 минут.
Программа рассчитана на детей от 12 лет и выше
Учащимся предстоит познакомиться с основами электроники, автоматики и робототехники на примере создания простого кибернетического устройства - маленького спортивного робота, который должен будет уметь ездить по полосе, отслеживая свое местоположение на линии. Это устройство учащиеся будут собирать сами, постепенно проходя все этапы его создания - от изготовления платы и знакомством с паяльником до изготовления ходовой части и отладки схемы. В процессе обучения учащимся предстоит прослушать необходимый теоретический материал - цикл лекций, рассказывающий о том, что такое робототехника, как работают полупроводниковые приборы и что представляют собой датчики. Обучение заканчивается соревнованиями роботов.
Курс является начальным, базовым и не предполагает наличия у обучаемых навыков в области электроники. Уровень подготовки - произвольный.
Целью курса является ознакомление с основами робототехники и создание простого робота (кибернетического устройства), решающего задачу движения по полосе.
Для достижения поставленной цели требуется решить следующие задачи:
В теоретическом плане обучаемому требуется усвоить базовые понятия следующих разделов:
1. Основы робототехники.
2. Теоретические основы простейшей элементной базы.
3. Элементарная механика и конструирование.
4. Основы схемотехники.
В практическом плане обучаемый должен освоить:
1. Практические навыки работы с паяльником, простейшим слесарным и электро- инструментом.
2. Простейшие технологии производства печатных плат.
3. Элементарное техническое конструирование.
4. Работу с простейшими измерительными приборами.
Учащиеся могут быть разбиты на бригады (команды) из двух человек. Каждая бригада (команда) должна к концу обучения изготовить своего робота.
При проведении занятий по основам схемотехники и электроники используется конструктор «Знаток».
Обучение заканчивается соревнованиями роботов.
Упражнения (виды состязаний):
1. Движение по простой полосе
2. Поиск источника света (опционально)
3. Робосумо (опционально)
Содержание курса
|
№ |
Тема |
Содержание |
Часы |
|
1 |
Введение |
Лекция. Цели и задачи курса. Что такое роботы. Ролики, фотографии и мультимедиа. Рассказ о соревнованиях роботов: Евробот, фестиваль мобильных роботов, олимпиады роботов. Спортивная робототехника. В т.ч. - бои роботов (неразрушающие). Конструкторы и «самодельные» роботы. |
1 |
|
Основы электроники |
Лекция. Элементная база. Сопротивления, транзисторы, диоды. |
1 |
|
|
2 |
Основы электроники |
Практика. Работа с конструктором «Знаток» |
2 |
|
3 |
Печатные платы |
Практика. Изготовление печатной платы, травление. |
1 |
|
Работа с паяльником |
Практика. Техника безопасности. Работа с паяльником. Залуживание проводов и платы, сверление. |
1 |
|
|
4 |
Монтаж схемы |
Практика. Изготовление базовой схемы. Разрисовывание платы, маркировка транзисторов. Монтаж элементов. |
2 |
|
5 |
Монтаж схемы |
Практика. Продолжение паяния. Подготовка монтажных проводов. Предварительное тестирование схемы (без датчиков, с закоротами). Припаивание выносных элементов (фототранзистор, излучатели, провода питания и т.п.). Подключение питания, индикации и проч. Тестирование. |
2 |
|
6 |
Основы механики и электромеханики |
Лекция. Электродвигатели, редукторы, схемы приводов (дифференциальный привод, рулевое устройство). Трех- и четырех- колесные тележки. |
1 |
|
Корпусные работы |
Практика. Ходовая часть. Изготовление рамы. Работа с пластиком. |
1 |
|
|
7 |
Датчики |
Лекция. Органы чувств робота. Датчики. ИК-излучатели и ИК-приемники. |
1 |
|
Сборка робота |
Практика. Изготовление и компоновка датчиков. Монтаж узлов, системы питания, датчиков. |
1 |
|
|
8 |
Сборка робота |
Практика. Окончательный монтаж, отладка, настройка датчиков. |
2 |
|
9 |
Наладка |
Практика. Испытания робота на полигоне, пробные заезды по полосе. |
2 |
|
10 |
Дополнение |
Практика. Адаптация робота для решения дополнительных задач (поиск света). |
2 |
|
11 |
Подготовка к соревнованиям |
Подготовка робота и завершение отладки, оформление роботов. |
2 |
|
12 |
Соревнования |
Практика. |
2 |
|
Всего часов |
24 |
||
Об авторе
Карпов Валерий Эдуардович, доц., к.т.н.
научный руководитель проектов научно-учебной лаборатории
Робототехники и искусственного интеллекта Политехнического музея,
Вице-президент Российской ассоциации искусственного интеллекта,
в.н.с. НИИ Информационных технологий.