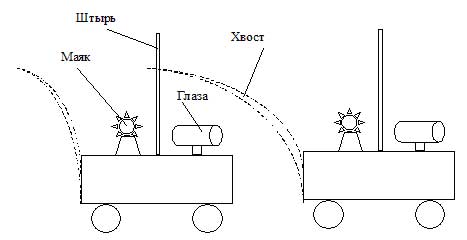
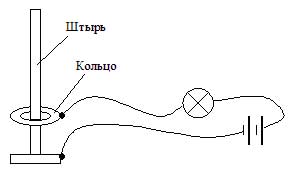
Рис. 1. Пример конструкции штыревого датчика
Введение
В документе представлены регламенты состязаний малых роботов с
автоматическим управлением. Роботы должны представлять собой автономные
конструкции с локальным (бортовым) управлением. Вмешательство оператора
допускается лишь на этапах подготовки и включении/ выключении устройства.
Повреждение роботов (механическое или электронное) противником в ходе состязаний
не допускается.
Робот может иметь любую ходовую часть, произвольное
устройство датчиков и системы управления.
Робот должен удовлетворять
следующим обязательным требованиям:
Роботы-дуэлянты
”Раз, два, три, четыре, пять – я иду тебя
искать!”
Задачей является поражение датчика-мишени противника – либо
контактное (датчик-штырь), либо бесконтактное (использование ИК-излучателя и
ИК-датчика).
Роботы должны быть оснащены датчиками препятствий для избежания
механических повреждений конструкций. Конструкция датчиков препятствий –
произвольная, от простейших контактных до ИК, УЗ и т.п.
На каждом участнике
поединка устанавливается ИК-излучатель, являющийся маяком для соперника. Каждый
робот оснащается соответствующими ИК-датчиками (глазами), позволяющими
определить местонахождение противника. Количество ИК-датчиков может
варьироваться от одного до двух.
Роботы осуществляют поиск соперника, выход
на дистанцию поражения и последующую атаку – либо механическую (используя
эффектор-хвост), либо "стреляя" из ИК-пушки.
Обязательными реакциями роботов
являются:
Класс "Контакт"
"Контакт! Есть контакт!"
Целью является задевание хвостом вертикального контактного датчика-штыря, расположенного на корпусе соперника.
Датчики и эффекторы
Обязательными, в дополнение к маякам, "глазам" и датчикам
препятствий, являются:
- датчик касания (штырь);
- хвост
(эффектор).
Датчик касания представляет собой вертикально установленный
штырь, доступный для касания "хвостом" противника. При срабатывании датчика
должны раздаваться звуковой и световой сигналы, оповещающие о "поражении"
робота. При этом желательно, чтобы пораженный робот перешел в режим
останова.
|
Рис. 1. Пример конструкции штыревого датчика |
|
Касание датчика-штыря осуществляется гибким "хвостом".
Расположение "хвоста" – произвольно. Обязательными требованиями является равные
габариты "ударной" части и штыря-приемника.
|
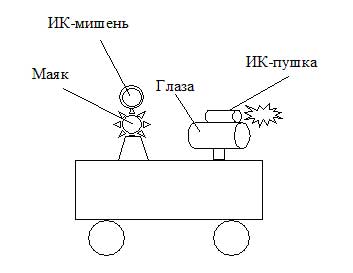
Рис. 2. Рекомендуемое расположение датчиков и эффекторов |
|
Класс "бесконтактные"
“Один выстрел – один робот…”
Целью является "поражение" из ИК-пушки датчика-мишени,
расположенного на корпусе соперника.
Компоновка датчиков и эффекторов
аналогична классу "контакт" за исключением того, что контактный штырь и хвост
заменены на ИК-приемник и ИК-пушку.
|
Рис. 3. Рекомендуемое расположение датчиков и эффекторов |
|
Датчики и эффекторы
Обязательными, в дополнение к маякам, "глазам" и датчикам
препятствий, являются:
- ИК-пушка;
- датчик-мишень.
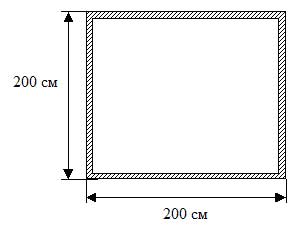
Конструкция полигона
Участники обоих классов – контактные и бесконтактные –
соревнуются на одном полигоне. Полигон – это квадратная огороженная площадка
200 x 200 см. (короб). Высота
ограждающего борта - 10 см.
|
Рис. 4. Полигон |
|
Покрытие должно обеспечивать хорошее сцепление колес
(гусениц) без проскальзывания.
Цвет покрытия – не должно быть зеркальных
бликов от маяков.
Цвет бортов определяет расстояние реакции ИК датчиков, чем
светлее – тем дальше. Однако робот не должен реагировать на отраженный сигнал
маяка от борта.
Возможно введение в состав полигона искусственных
препятствий (как разновидность типов поединков)
Правила проведения поединков
Точками старта являются противоположные концы
ринга.
Поединок состоит из 3-х раундов. Раунд заканчивается в следующих
случаях:
1. после поражения одного из противников;
2. по решению судейской
коллегии (судьи поединка);
3. в случае разрушения (выхода из строя) одного из
участников.
Если виновником повреждения (разрушения) является одна из
противоборствующих сторон, то виновной стороне присуждается безусловное
поражение.
Если повреждение (разрушение) наступает по собственной вине робота
(отсутствие реакции на препятствие или поломка), то победа присуждается
сопернику.
Победителем является устройство, набравшее большее количество
очков.
Соревнующиеся роботы разделяются на весовые категории по решению
судейской коллегии.
Обязательным является требование равенства условий для
поражения противника. По этим подразумевается согласованное расположение
датчиков-мишеней и эффекторов (хвостов и излучателей).
Соревнования
проводятся в соответствии с турнирной таблицей (жеребьевкой), определяемой
судейской коллегии.
Робо-сумо
Цель состязания – выталкивание противника за пределы
ринга.
В начале поединка роботы устанавливаются на противоположных концах
ринга. Вмешательство операторов в ход поединка запрещено.
Расположение
роботов в начале поединка на максимальном расстоянии друг от друга определяет
необходимость наличия системы технического зрения, в простейшем виде – ИК-маяков
и датчиков.
Конструкции маяка и датчиков приведены в Приложении 1.
Требования к роботам
Специальных требований к конструкции и габаритам роботов нет
(см. общие требования к категории малых роботов).
Оснащение роботов маяками
(ИК-излучателями) и соответствующими приемниками ("глазами") для поиска
противника, методы пассивного обнаружения и т.п. является не обязательным.
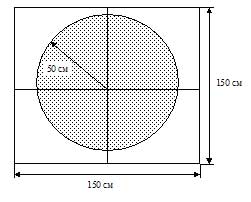
Конструкция полигона
Полигон представляет собой квадратную площадку размером 150x150 см. с размеченным кругом радиусом 50 см.
|
Рис. 5. Полигон |
|
Цвет круга – черный. Цвет площадки – белый.
Покрытие
должно обеспечивать хорошее сцепление колес (гусениц) с поверхностью (желательно
без проскальзывания).
Правила проведения поединков
Точками старта являются противоположные концы ринга за
пределами круга.
Поединок состоит из 3-х раундов. Раунд заканчивается в
следующих случаях:
1. после поражения одного из противников (выталкивание за
пределы ринга);
2. по решению судейской коллегии (судьи поединка);
3. в
случае разрушения (выхода из строя) одного из участников.
Под
выталкиванием понимается положение, когда робот целиком находится вне ринга.
Произвольный выход за пределы ринга также считается поражением в текущем раунде.
В связи с этим рекомендуется оснащение робота соответствующими
датчиками.
Если виновником повреждения (разрушения) является одна из
противоборствующих сторон, то виновной стороне присуждается безусловное
поражение.
Если повреждение (разрушение) наступает по собственной вине
робота, то победа присуждается сопернику.
Победителем является устройство,
набравшее большее количество очков.
Соревнующиеся роботы разделяются на
весовые категории по решению судейской коллегии.
Каждая сторона может
потребовать наличие у соперника ИК-маяка. В этом случае взаимное расположение
ИК-датчиков и маяков должно быть согласовано.
Соревнования проводятся в
соответствии с турнирной таблицей (жеребьевкой), определяемой судейской
коллегии.
Весовые категории. Разница в весе соперников не должна
быть более 50% за исключением ситуации добровольного согласия обеих сторон на
поединок.
Примечание. Поединки LEGO-подобных роботов проходят
отдельно от поединков устройств иной конструкторской базы. Это связано с
вопросами надежности конструкций.
Движение по полосе
В предлагаемых ниже видах состязаний решается классическая
робототехническая задача – движение по полосе. В зависимости от сложности
маршрута рассматриваются 3 вида состязаний:
1. движение по монохромной
замкнутой полосе без пересечений;
2. прохождение полосы препятствий
(монохромная замкнутая полоса без пересечений по неровной поверхности);
3.
прохождение инверсной полосы с самопересечениями.
Цель соревнований – пройти
дистанцию за минимальное время.
Простая
линия
“Тише едешь – дальше будешь…”
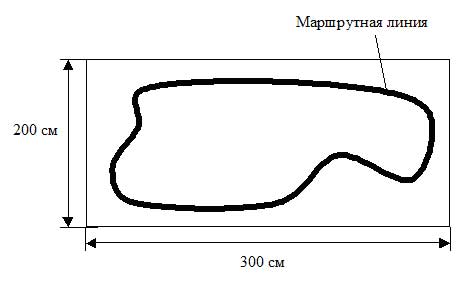
Движение осуществляется по маршруту, определяемому замкнутой черной линией без самопересечений. Линия рисуется на ровной поверхности.
Конструкция полигона
Полигон представляет собой прямоугольную площадку 200 x 300 см. На полигоне нарисована
маршрутная линия, по которой должен пройти робот.
|
Рис. 6. Полигон |
|
Ширина линии – 5 см. Цвет линии – черный. Фон –
белый.
Минимальный радиус кривизны линии – 50 см.
Полоса препятствий
"Робот в гору не пойдет, робот гору
обойдет…"
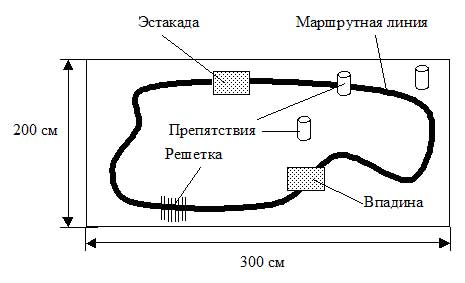
Движение осуществляется по маршруту, определяемому замкнутой черной линией без самопересечений. На линии могут быть различного рода простые препятствия.
Конструкция полигона
Полигон представляет собой прямоугольную площадку 200x300 см.
На полигоне нарисована маршрутная линия, по которой должен пройти робот. На пути
следования робота могут встречаться различного рода препятствия.
|
Рис. 7. Полигон |
|
Ширина линии – 5 см. Цвет линии – черный. Фон –
белый.
Габариты полосы движения – 40 см. За пределами габаритной полосы
допустимо наличие препятствий и изменение цвета поверхности.
Минимальный
радиус кривизны линии – 50 см.
На габаритной полосе допустимо наличие
препятствий 4-х видов:
1. эстакада
2. наклонный участок
3.
впадина
4. решетка
Максимальная высота эстакады и глубина впадины – 1
см., углы наклона – не более 5o. Решетка представляет несколько
брусков, расположенных поперек линии движения. Расстояние между брусками – 5
см., габариты бруска – 200 x
5 x 5 мм.
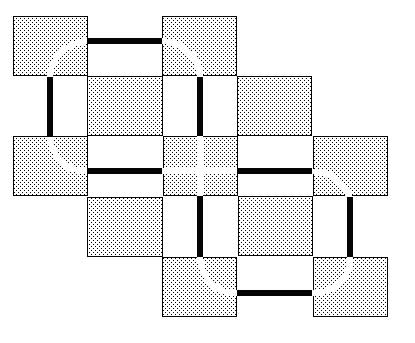
Инверсная линия
Этот вид состязаний является упрощенным вариантов одного из
видов соревнований Фестиваля мобильных роботов.
Полигон представляет собой
прямоугольную площадку 200 x 300
см. Полигон разбит на квадратные клетки со стороной 50 см, окрашенные так, что
образуется «шахматная доска». На полигоне нанесена полоса шириной 50 мм (светлая
на темных и темная на светлых квадратах), которая состоит из отрезков прямых и
дуг окружностей радиуса 50 см, стыкующихся на границах квадратов. Полоса имеет
самопересечения; при этом ее прямолинейные участки пересекаются под прямым углом
в середине квадратов, проходимых роботом по прямой без поворотов
|
Рис. 8. Примерный вид фрагмента полигона |
|
Правила проведения соревнований «Движение по полосе»
Победителем является робот, прошедший дистанцию за минимальное
время.
Точки старта и финиша, а также направление начального движения
определяются судейской коллегией.
Каждый участник имеет 3 попытки прохождения
дистанции (3 заезда). Засчитывается лучшее время. Максимальное время одного
заезда – 5 минут.
Робот, сошедший с линии и не могущий самостоятельно
вернуться на нее в течение 1 минуты, снимается с заезда.
Приложение 1. Система ориентации по активным маякам
Ниже представлены варианты решений системы ориентации – маяк и ИК-датчики ("глаза"). Кроме того, описана конструкция "пушки" – системы гашения маяка.
Маяк
Маяк представляет собой одноплатную конструкцию, на которой
установлено 8 ИК светодиодов, формирующих круговую диаграмму
направленнности.
|
|
|
Маяк периодически генерирует специальные сигналы, которые
могут быть обнаружены приемниками – «глазами». Для модуляции ИК излучения
используются специальные широкополосные сигналы, которые позволяют обеспечить
устойчивое обнаружение маяков на большом расстоянии в условиях постоянной
засветки и импульсных помех.
Дальность обнаружения маяков – от 10 см до 4
м
Круговая диаграмма направленности маяков в горизонтальной плоскости
В
вертикальной плоскости диаграмма направленности имеет угол раскрыва +-30
градусов
Частота несущей ИК излучения 38 кГц
Тип модуляции –
широкополосные сигналы (М-последовательность)
Период генерации сигнала 300
мс
Питание маяков – вариант 1 - 9 В (батарея «Крона»)
вариант 2 - 12 В (от
8 до 15 В бортовое питание)
Ток потребления в активном режиме 12 мА
Ток
потребления в спящем режиме 2 мА
Время работы маяка от батареи «Крона» – 80
ч
Размеры d44x15 мм
Маяк имеет вход активации, он же является выходом
с открытым коллектором для индикации попадания по маяку («гашения»
маяка).
Включение маяка производится путем подачи на вход активации
сигнала низкого уровня длительностью более 200 мс (кнопка или логический
уровень).
При включении маяка он издает одиночный звуковой сигнал. При работе
маяка светодиод моргает с периодом 5 сек.
После включения питания маяк
переходит в активный режим.
Выключение маяка производится двумя
способами:
- путем подачи на вход активации сигнала низкого уровня
длительностью более 200 мс;
- подача на фотоприемник маяка специального
сигнала «гашения». При этом на выходе активации генерируется импульс низкого
уровня длительностью 500 мс.
При выключении маяка он издает двойной звуковой
сигнал и переходит в спящий режим. В спящем режиме светодиод не светится.
«Глаза»
|
|
|
«Глаза» представляют собой миниатюрные приемники ИК
излучения, способные принимать два типа сигналов от активных маяков (можно
распознавать два типа маяков). В настоящее время используются маяки, излучающие
один сигнал.
Приемник имеет два выхода с открытым коллектором, на котором
появляется сигнал низкого уровня- логический «0», когда «глаз» регистрирует
излучение маяка.
Если маяк не обнаружен, на выходе приемника присутствует
логическая «1» (высокий уровень).
Для увеличения дальности
обнаружения маяков платы приемников устанавливаются в корпус с оптической линзой
(1/2 детского бинокля). Фотоприемник ставится в фокус линзы. Излучение
собственного маяка не должно попадать на фотоприемник «глаза»
робота.
Частота несущей ИК излучения 38 кГц
Тип модуляции –
широкополосные сигналы (М-последовательность)
Питание 5 В
Ток потребления
8 мА
Размеры d16x5 мм
«Пушка»
«Пушка» представляет собой миниатюрный ИК излучатель,
передающий специальный маломощный сигнал для гашения маяка.
|
|
|
Имеет вход активации, при подаче на который сигнал
низкого уровня, «пушка» начинает генерировать сигнал гашения.
Дальность
гашения маяка до 50 см
Частота несущей ИК излучения 38 кГц
Тип модуляции –
широкополосные сигналы (М-последовательность)
Питание 5 В
Ток потребления
10 мА
Размеры 26 x11 мм
Сигналы
маяка
Для обеспечения большой дальности обнаружения при низкой
средней мощности ИК излучения маяков в качестве приемников излучения
используются стандартные телевизионные интегральные микросхемы инфракрасных
приемников. Они содержат в себе готовые приемные фотодиоды, усилители, полосовые
фильтры и т.п. элементы. Максимальная дальность приема сигнала такими
микросхемами составляет 6-10 метров. Одновременно они обеспечивают устойчивый
прием полезного сигнала в условиях постоянной засветки (дневное и искусственное
освещение) и дают приемлемую помехоустойчивость. Стоимость этих микросхем
невысокая, что делает систему в целом недорогой.
Для модуляции ИК излучения
используются специальные широкополосные сигналы, которые позволяют обеспечить
устойчивое обнаружение маяков на большом расстоянии в условиях постоянной
засветки и импульсных помех. Такие сигналы используются в помехозащищенных
системах связи – GSM системах, GPS приемниках и многих других. Сигнал
представляет собой определенную кодовую последовательность, модулированную
несущей частотой. В данной системе используется 100% амплитудная модуляция ИК
излучения светодиода сигналом, состоящим из 31 элемента.
Для логической единицы
передающий светодиод модулируется сигналом с частотой 38 кГц, для логического
нуля светодиод выключен.
Длительность одного импульса – 16 периодов колебаний
несущей частоты (38 кГц).
Такой сигнал является М-последовательностью и
обладает хорошими корреляционными свойствами.
Прием такого сигнала
производится с помощью т.н. согласованного приемника, который откликается только
на последовательность данного вида.