Выставка роботов 2013
Выставка робототехнических устройств
Политехнический музей
5 января 2013 г., 9 подъезд, 10:00-17:00
Участники выставки:
- кафедра "Робототехнические системы" МГТУ им. Н.Э. Баумана
- ИПМ им. М.В. Келдыша РАН, г. Москва
- Механико-математический факультет МГУ им. М.В. Ломоносова, г. Москва
- Кафедра 701 "Авиационные робототехнические системы" МАИ
- Лаборатория робототехники и искусственного интеллекта Политехнического музея, г. Москва
- Лаборатория робототехники и искусственного интеллекта Российского Нового Университета, г. Орехово-Зуево
- Объединение робототехники и технического конструирования "Робикон" Центра детского творчества "Родник" г. Орехово-Зуево
- Физико-математический лицей №239, г. Санкт-Петербург
ИПМ им. М.В. Келдыша РАН, механико-математический факультет МГУ, г. Москва
|
|
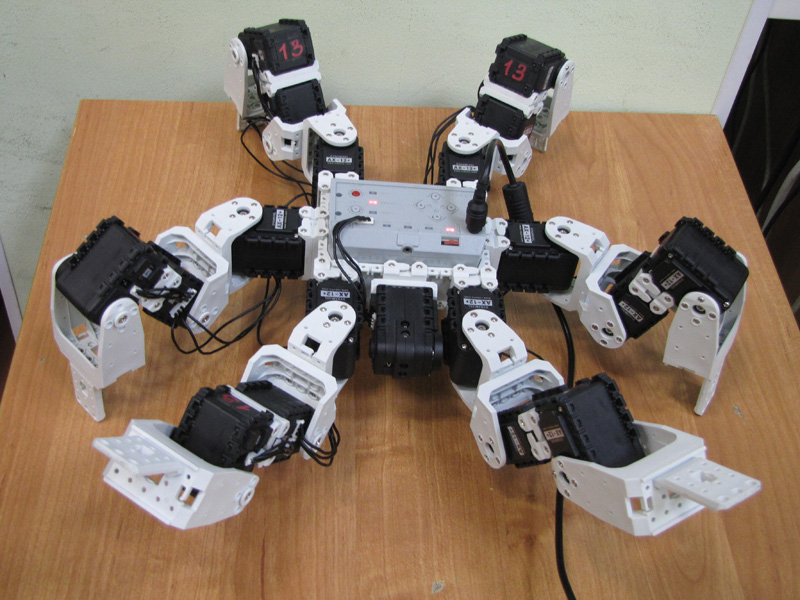
Малый шестиногий аппарат HEXMINI Робот предназначен для изучения принципов перемещения шагающих роботов. Робот имеет симметричную конструкцию с шестью конечностями. Каждая конченость обладет тремя степенями свободы и приводится в движение мощными сервомашинками. |
|
|
Манипулятор для работы в стесненной среде Манипулятор предназначен для работы в стесненной среде и позволяет "пролезать" сквозь небольшие отверстия. |



Кафедра 701 "Авиационные робототехнические системы" МАИ
|
|
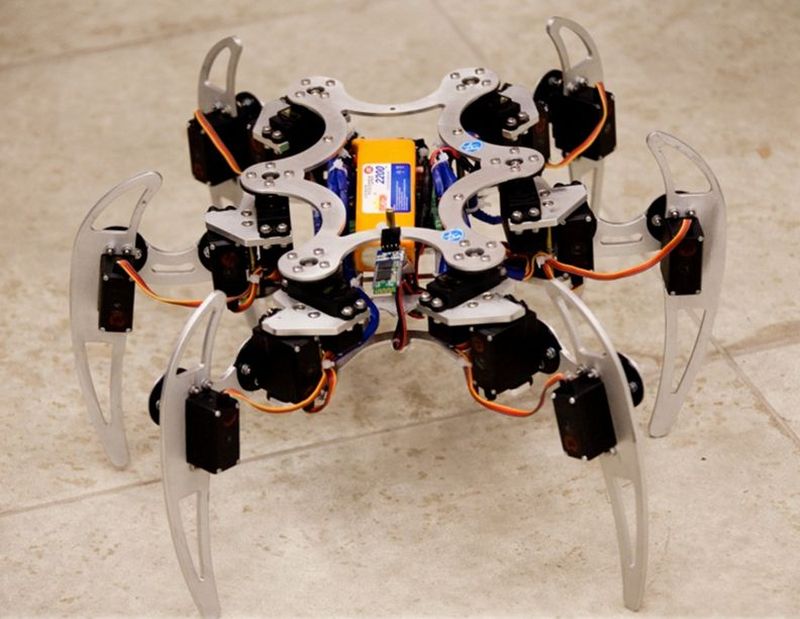
Инсектоморф ПАУК-1 Инсектоморф ПАУК-1 создан для изучения принципов движения сложных механизмов. Робот имеет шесть конечностей, каждая из которых обладает тремя степенями свободы. Конечности приводятся в движение сервомашинками. |
|
|
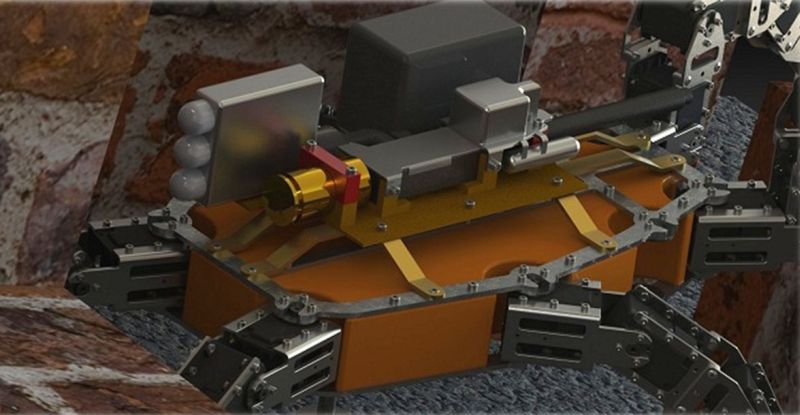
Большой робот-арахнид Полноразмерный робот-арахнид обладает массой 12 кг, имеет высокую проходимость и может нести на борту различную полезную нагрузку. Робот имеет восемь конечностей, по четыре степени свободы на каждую. На изображении представлена CAD модель, на которой робот вооружен пневматическим автоматическим оружием. |


Лаборатория робототехники и искусственного интеллекта Российского Нового Университета, г. Орехово-Зуево
|
|
Шестиногий шагающий робот "ШР-1" Робот "ШР-1" построен для изучения принципов шагания. |

Объединение робототехники и технического конструирования "Робикон" Центра детского творчества "Родник" г. Орехово-Зуево
|
|
Робот-собака "Робик" Робот Имеет датчики наличия объектов с дальномером (до 1 м). Имеется возможность воспроизведения звуков, речи и музыки. Словарный запас - более 100 слов. Может управляться и программироваться по каналу BlueTooth от компьютера. |
|
|
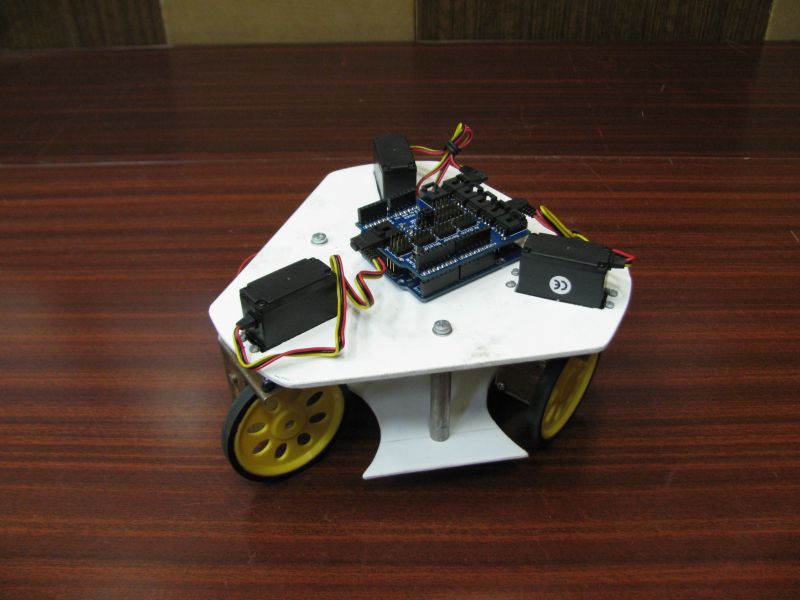
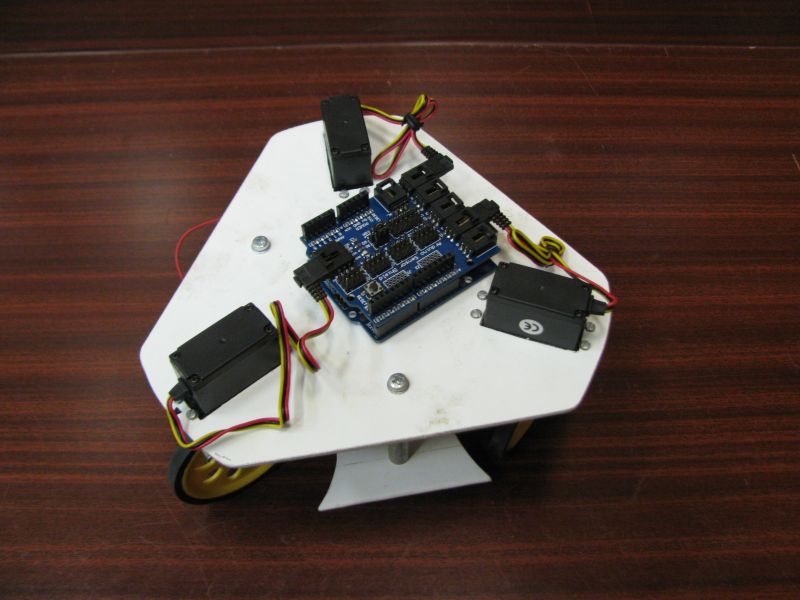
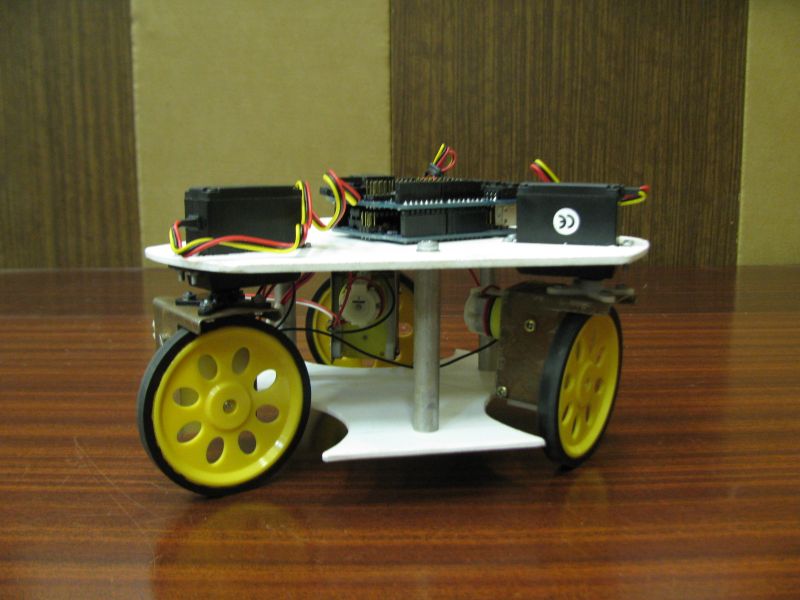
Робот со всенаправленными колесами "Звезда" Трёхколёсный робот, каждое колесо у которого ведущее. Колесо приводится в движение от двигателя постоянного тока (скорость вращения) и сервопривода (направление). |



Физико-математический лицей №239, г. Санкт-Петербург
|
|
Робот “Грета” Робот умеет играть в игру "ладушки". Робот обладает 4-мя степенями свободы в каждой руке, электромагнитными датчиками касания, алгоритмами обучения и элементами компьютерного зрения. Для управления используются два контроллера NXT, два сервоконтроллера Mindsensors и компьютер. |
|
|
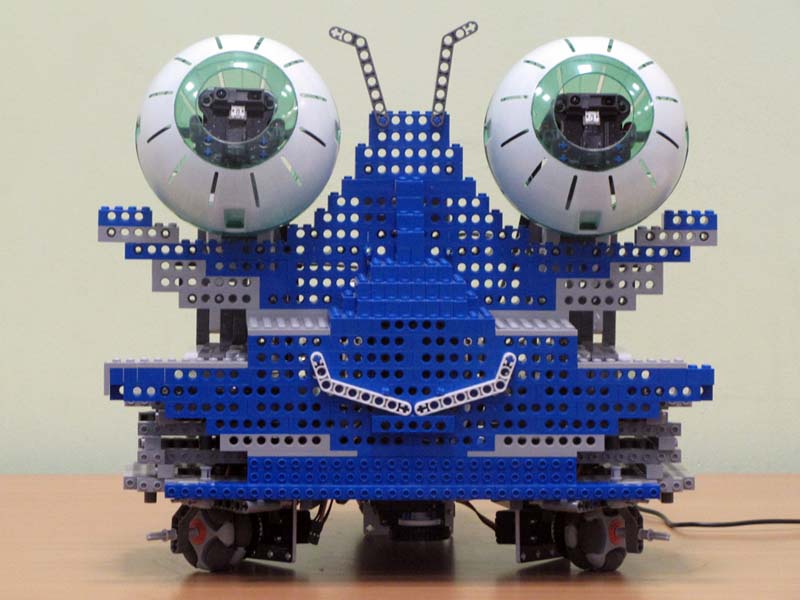
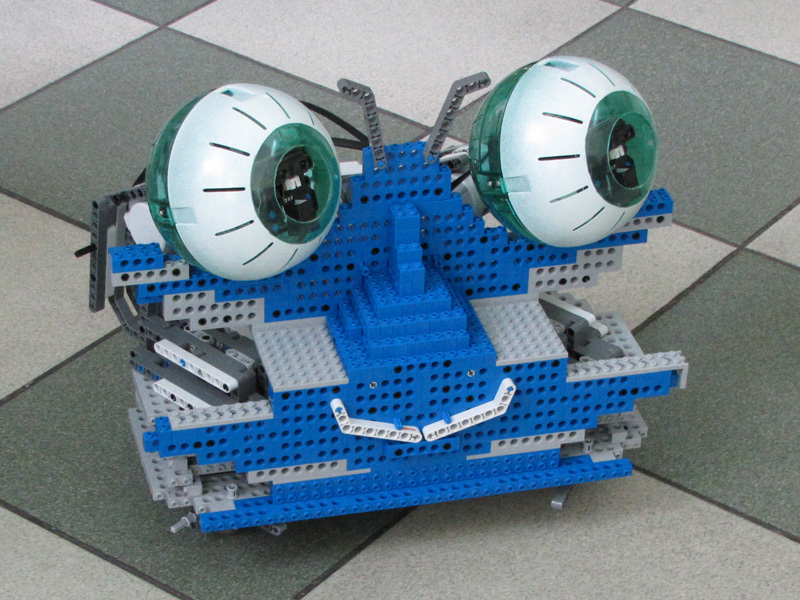
Робот "Глазастик" Робот предназначен для имитации глаз человека и слежения за объектами. Он оборужован простейшей системой воспроизведения речи для контакта с человеком. Шасси основано на трех омни-колесах, что позволяет совершать перемещения, сохраняя направление "взгляда" на объект. Система управления: два контроллера NXT и аудиоконтроллер. |
|
|
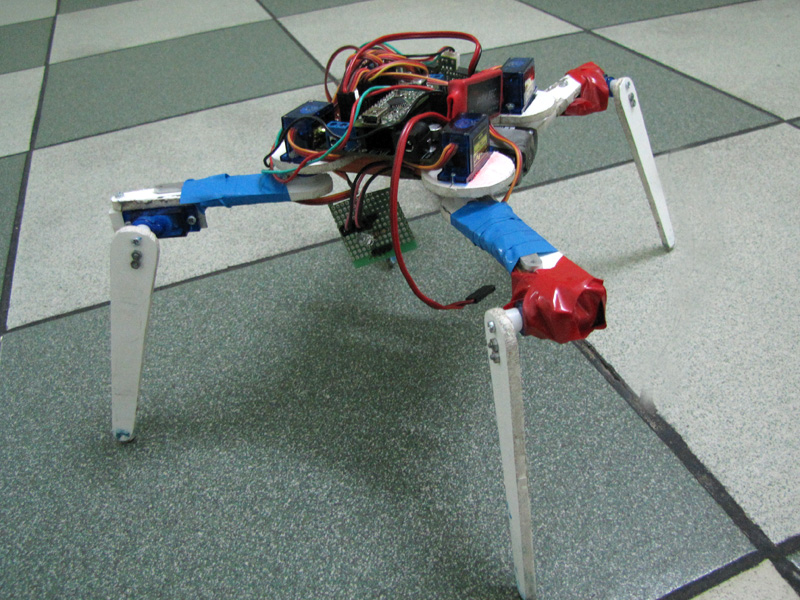
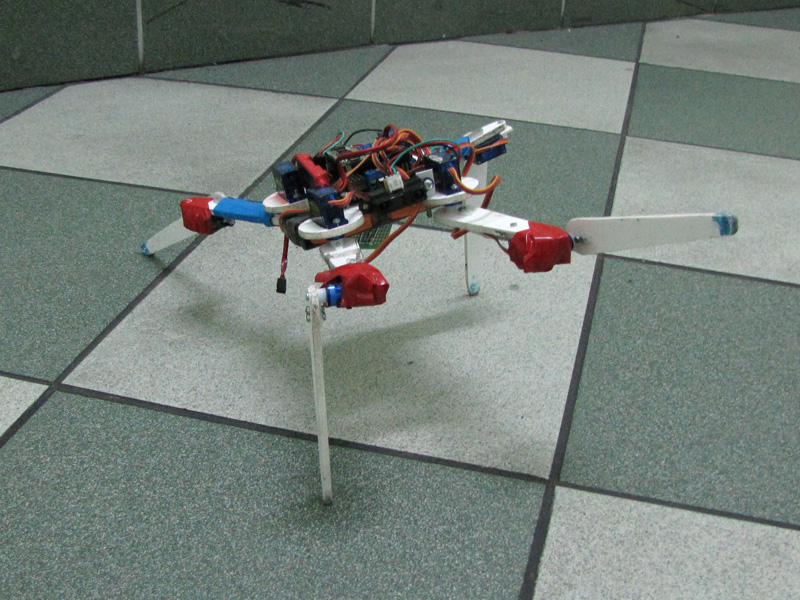
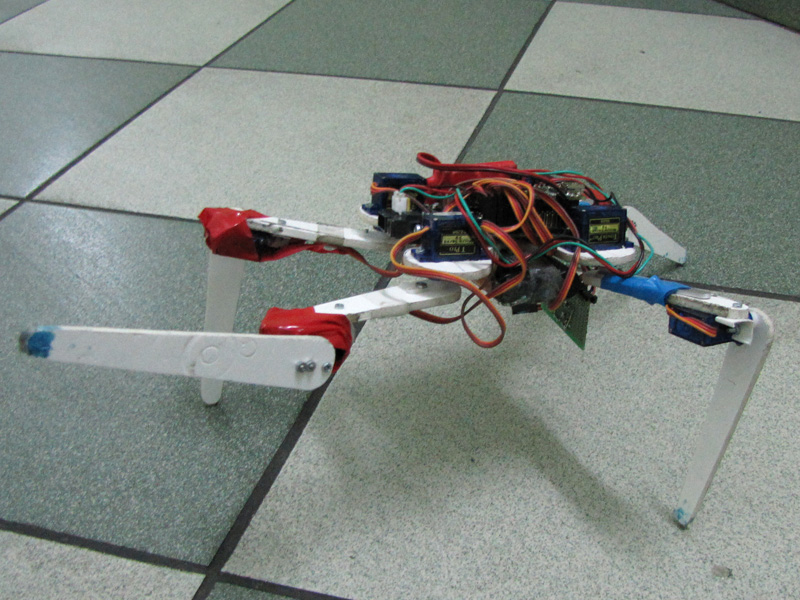
Четвероногий шагающий робот-паук Робот предназначен для изучения перемещения на четырех точках опоры. Система управления: контроллер Arduino. |
|
|
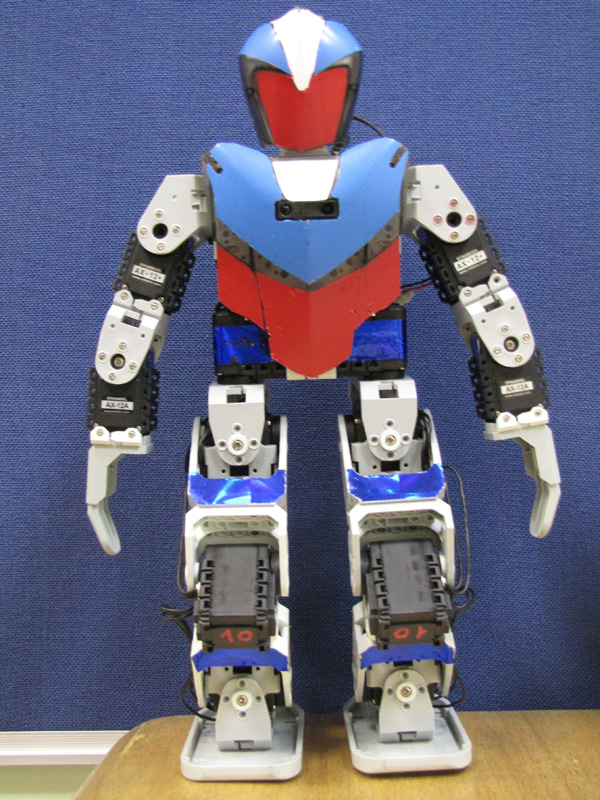
Роботы из конструктора Bioloid Роботы построены из конструктора Bioloid и предназначены для изучения различных принципов движения. |