

Разработки лаборатории
Исследовательские роботы
«Внутренние» проекты
|
Проект "Адаптант" Адаптивный Мобильный Универсальный Робот А.М.У.Р. Год создания - 2005 Авторский коллектив:
|
|

|
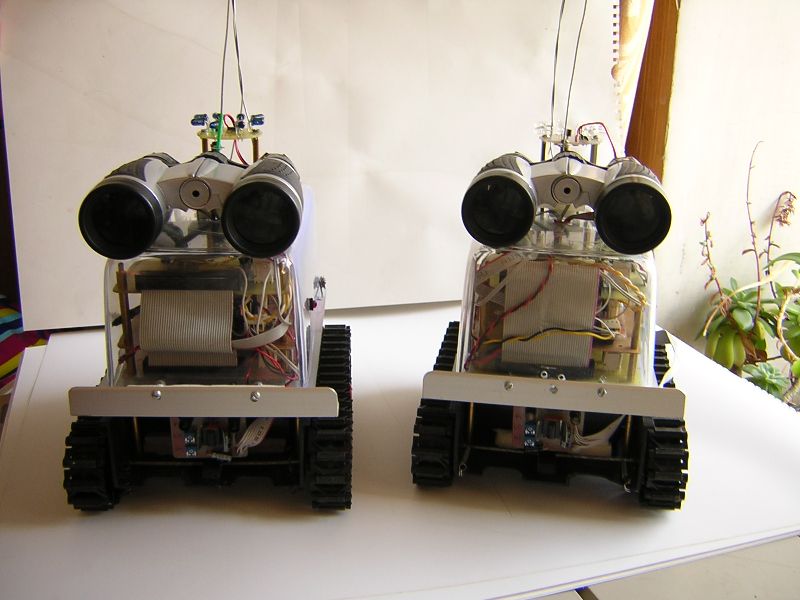
Роботы-охотники Два робота-дуэлянта, предназначенных для участия в неразрушающих битвах роботов. Год создания - 2006, ходовая часть модернизирована в 2008 году. Авторский коллектив:
|
|
|
Робот-экскурсовод РЭКС Должен представлять собой мобильное автономное устройство, осуществляющее движение по заданному маршруту и выполняющее функции экскурсовода в соответствии с заданной программой. Год начала разработки - 2006, корпус полностью переделан в 2010 году. Авторский коллектив:
|
|


|
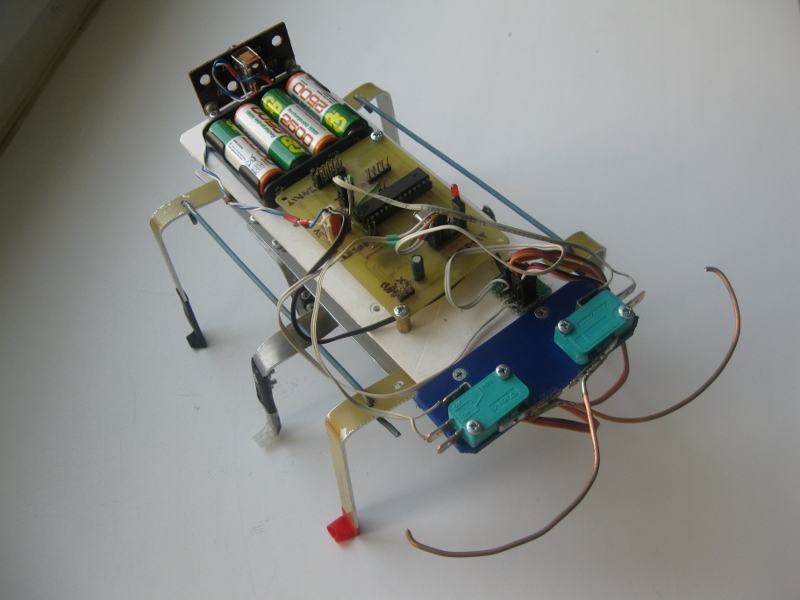
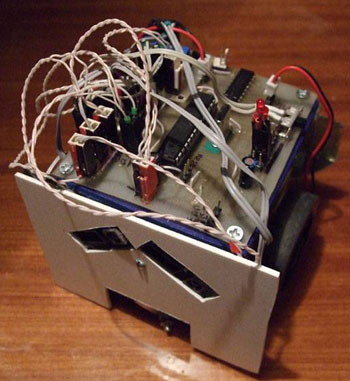
Робот "Зенон" Малый мобильный робот, демонстрирующий простую безусловно-рефлекторную модель поведения. Год создания - 2008 Автор: Волкова Т.А., РГГУ |
|

|
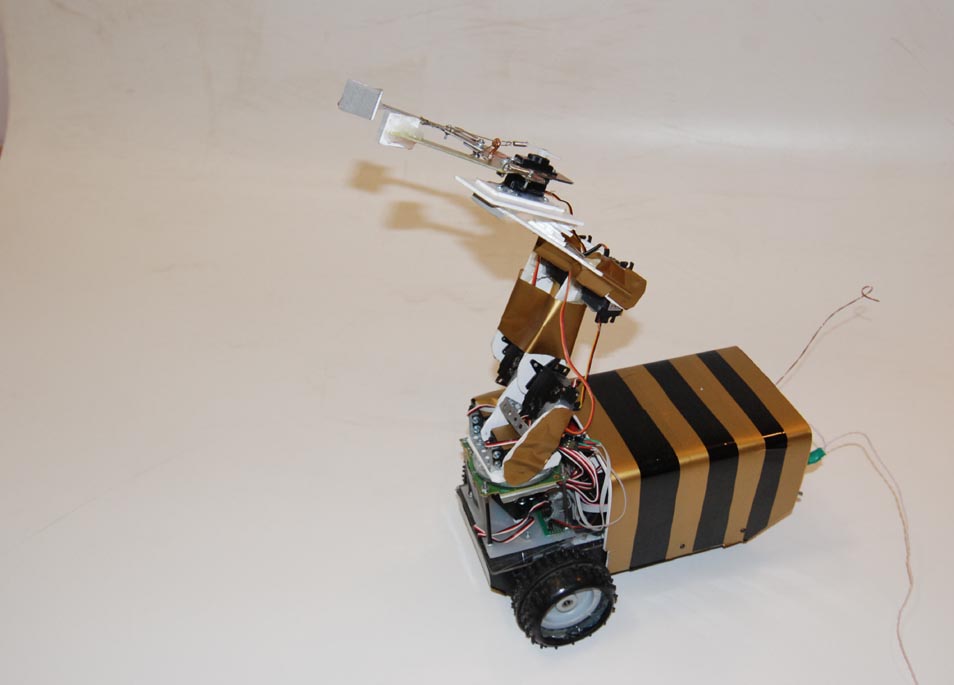
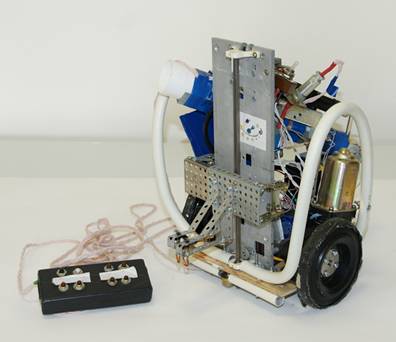
Робот "Плут-3" Робот ПЛУТ-3 обладает антропоморфной системой управления. Управление манипулятором осуществляется движениями руки оператора. Положение руки считывается при помощи переменных резисторов. Через АЦП воздействие передаётся на манипулятор. Год создания - 2008 Автор: Карпов В.В., шк.467 |
|
|
Робот "Помощник" Робот предназначен для проведения исследований в области интеллектуальной робототехники по следующим направлениям:
Год создания - 2008 Авторский коллектив:
|
|

|
Робот "Скорпион-2" Год создания - 2009 Автор: Карпов В.В., шк.467 |
|
|
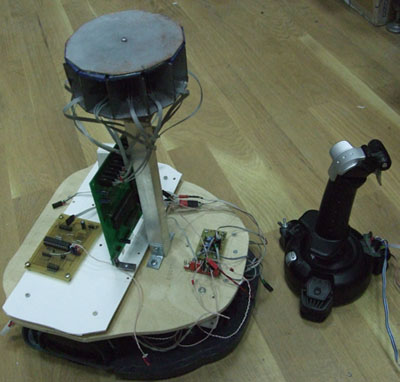
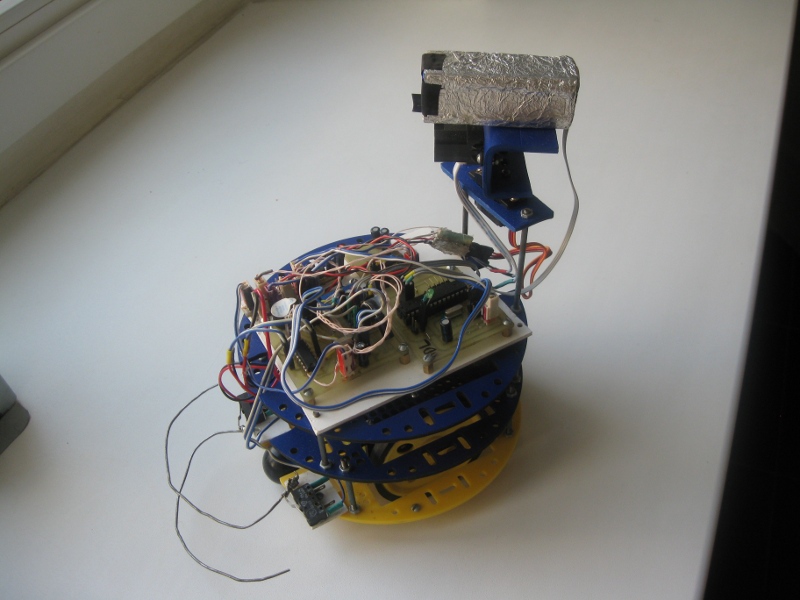
Робот "Навигатор" Универсальная платформа для решения различных задач
Год создания - 2009 Автор: Волкова Т.А., РГГУ |
|
|
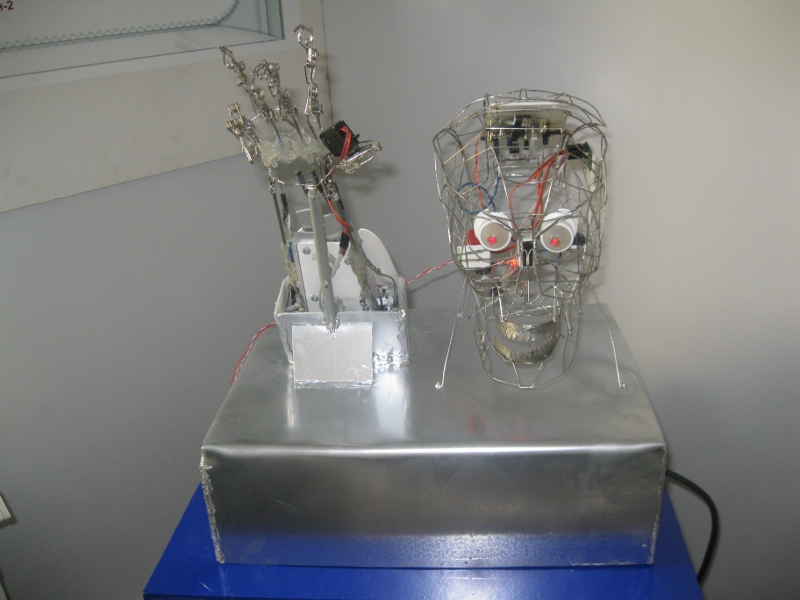
Рука и голова антропоморфного робота Год создания - 2009 Автор: Томилин В.А., МГТУ им. Баумана |
|
|
Робот «ТУР-2» ("Скворец") Научно-исследовательская работа Аналог робота "ТУР-1" Год создания - 2010 Автор: Карпов В.В., шк.467 |
|

|
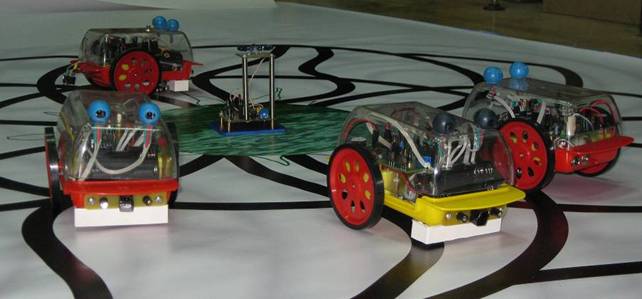
Коллектив роботов Научно-исследовательская работа Задача - навигация на местности Год создания - 2010 Автор: Ольшанский Д.Л., МФТИ |
|
«Внешние» проекты
|
Робот «ТУР-1» Научно-исследовательская работа
Используемые технологии
Элементная база
Год создания - 2009 Автор: Карпов В.В., шк.467 |
|

|
Проект «Робопарк» Научно-исследовательская работа Год создания - 2009 Авторский коллектив:
|
|
Спортивные роботы
|
Робот «САТУРН»
Элементная база
Год создания - 2009 Авторы:
|
|
|
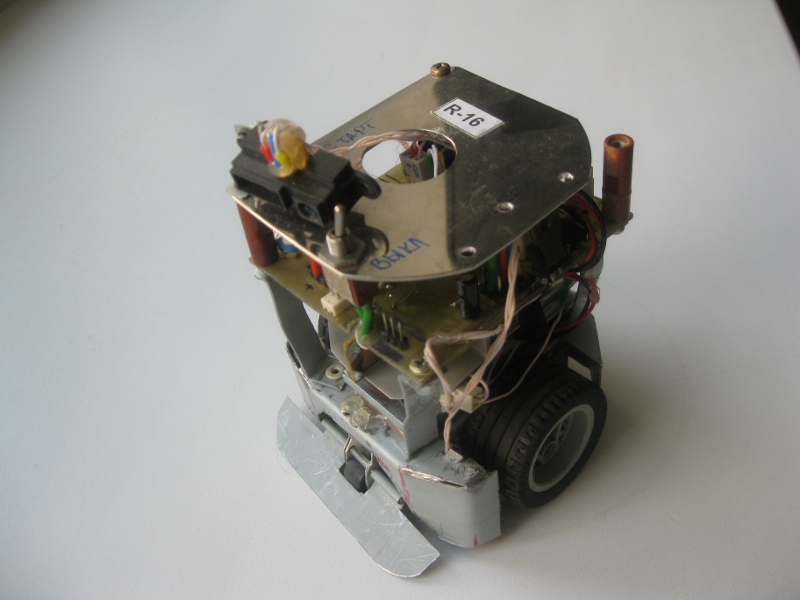
Робот «ТЯПА» (1КА1) Учебная работа.
Элементная база
Год создания - 2009 Автор: Карпов В.В., шк.467 |
|

|
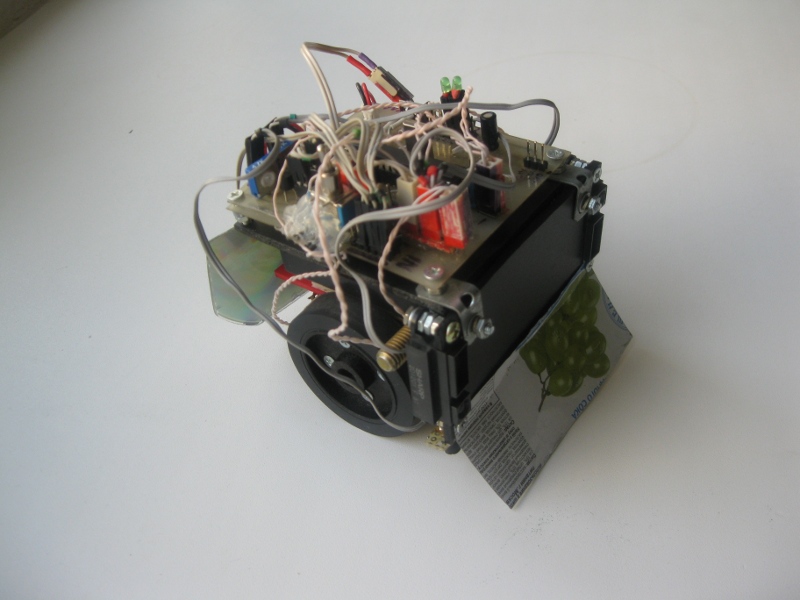
Робот «Чеширский кот»
Элементная база
Год создания - 2009 Автор: Волкова Т.А., РГГУ |
|
|
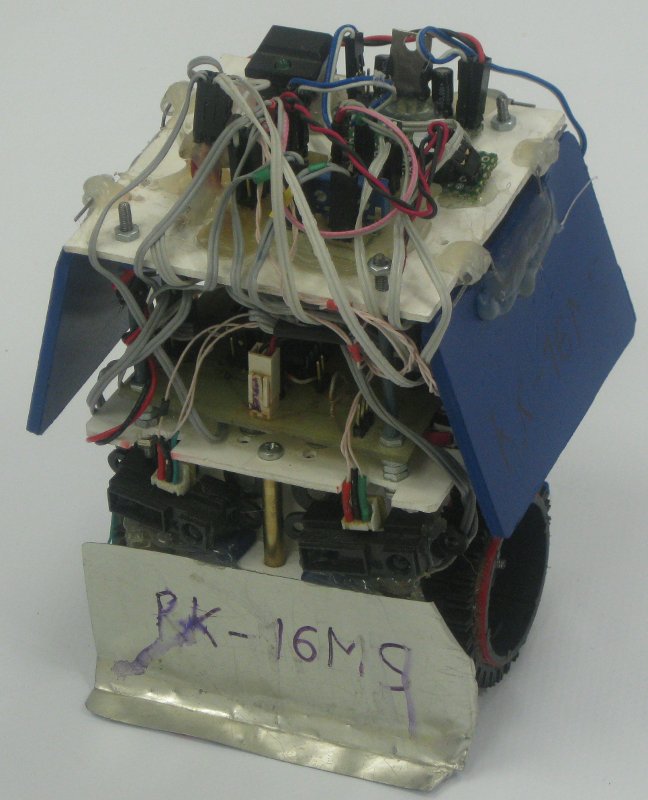
Робот «RK16MS»
Год создания - 2009 Автор: Карпов В.В., шк.467 |
|
|
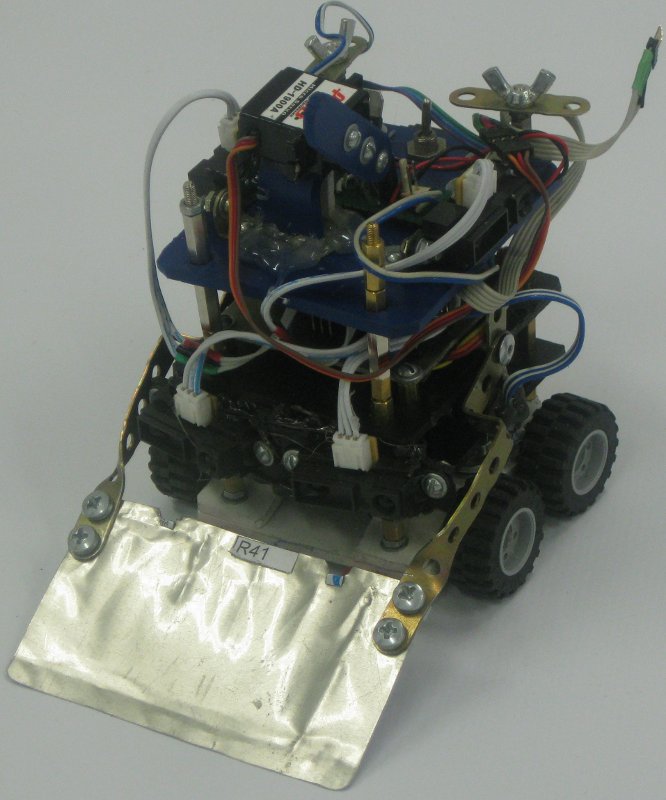
Робот «RK19MS»
Год создания - 2010 Автор: Карпов В.В., шк.467 |
|
|
Робот «Зеркальный»
Год создания - 2009 Автор: Харитонов А.Г. |
|
|
Роботы-помехи
Год создания - 2010 Автор: Карпов В.Э. |
|
