Манипуляционная и шагающая робототехника
Авторский коллектив:
Описание проекта
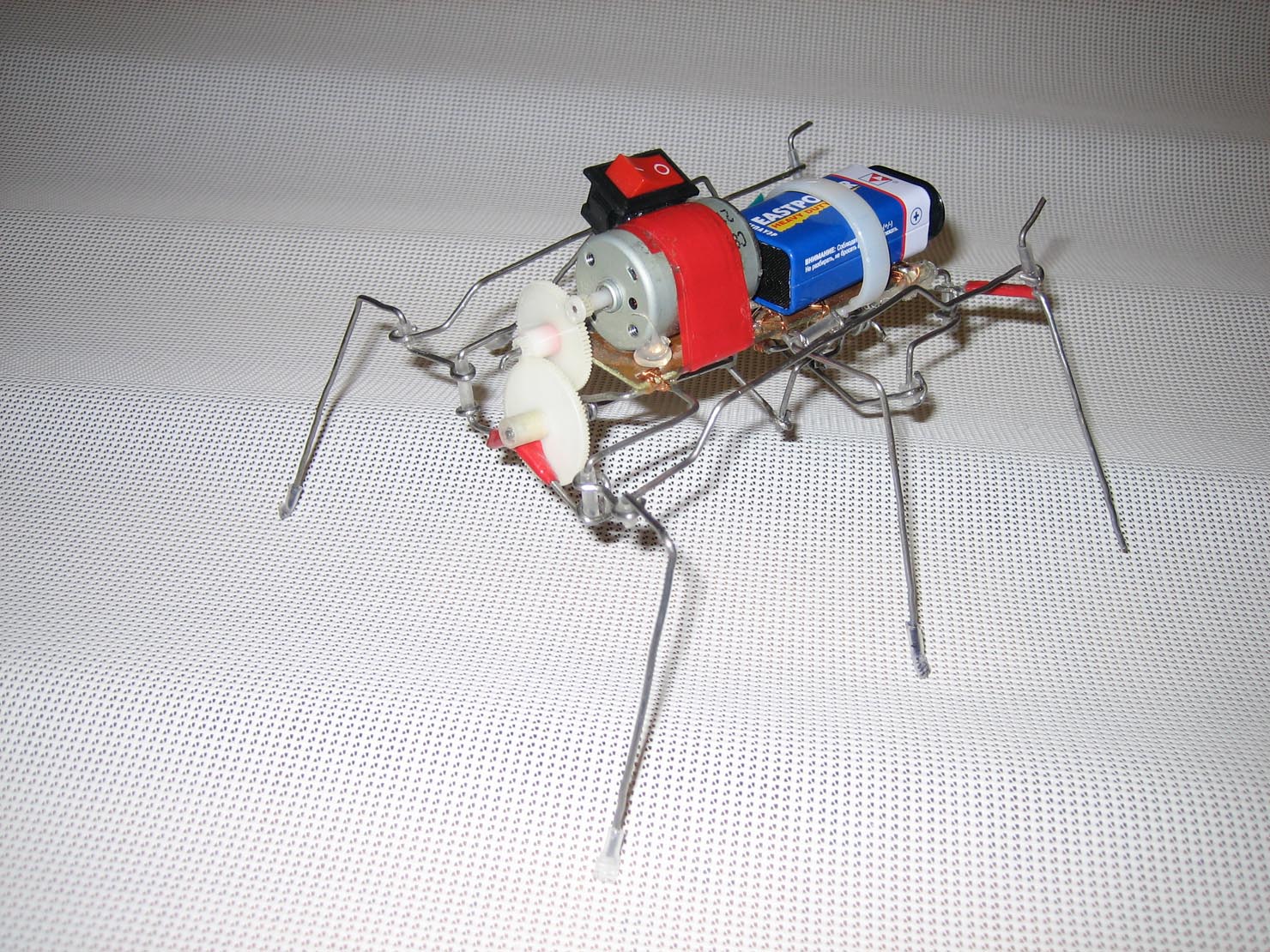
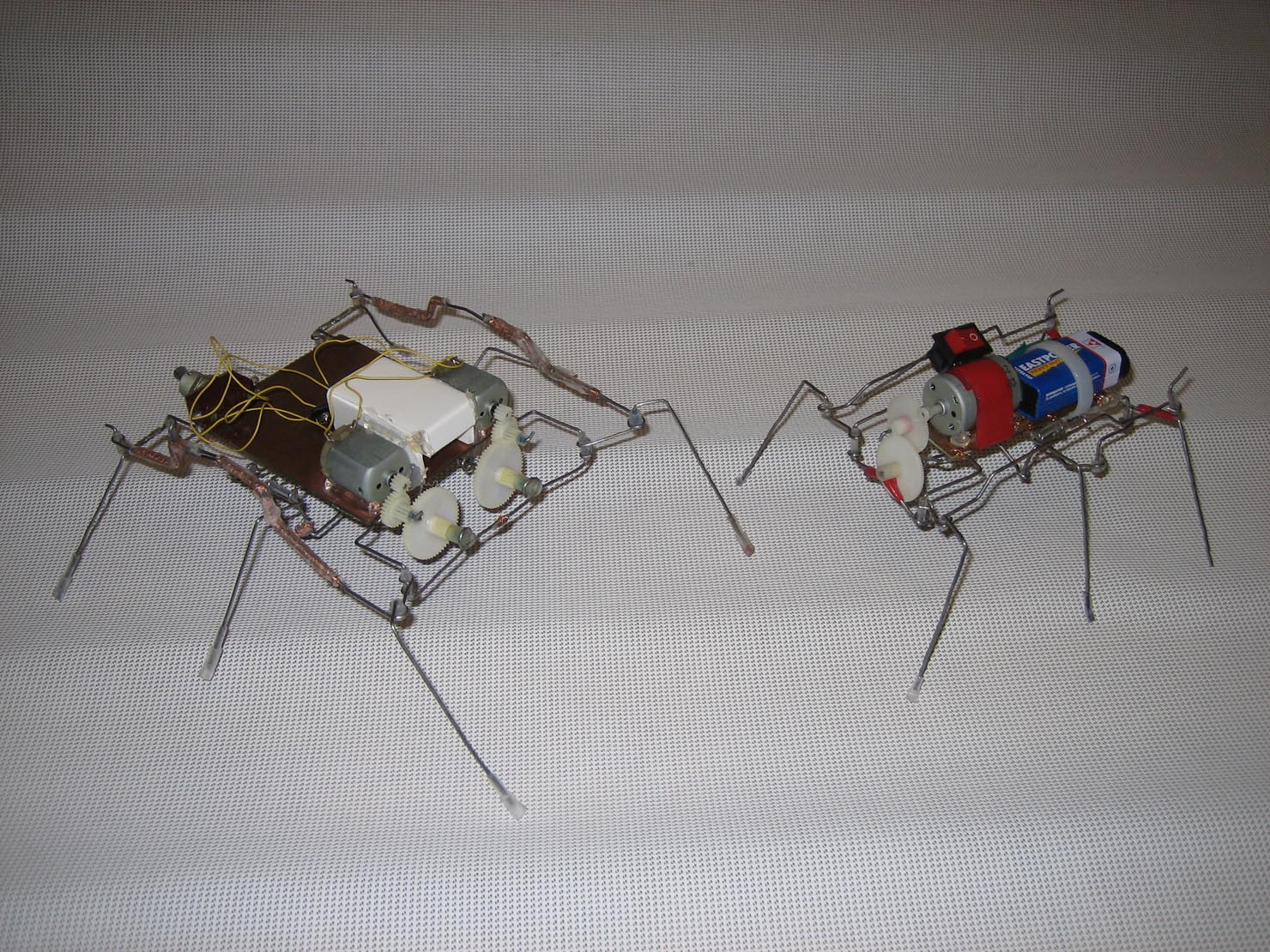
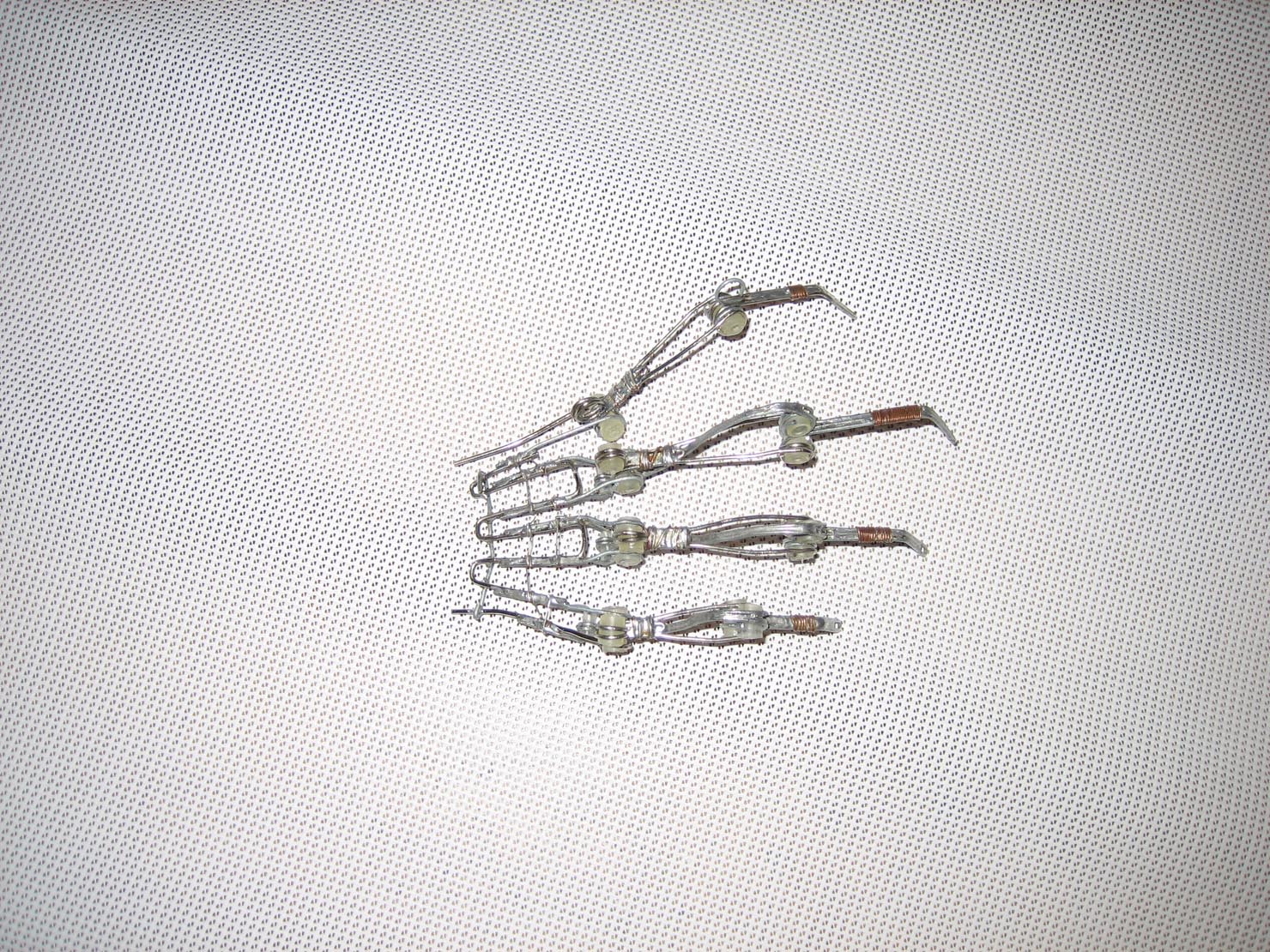
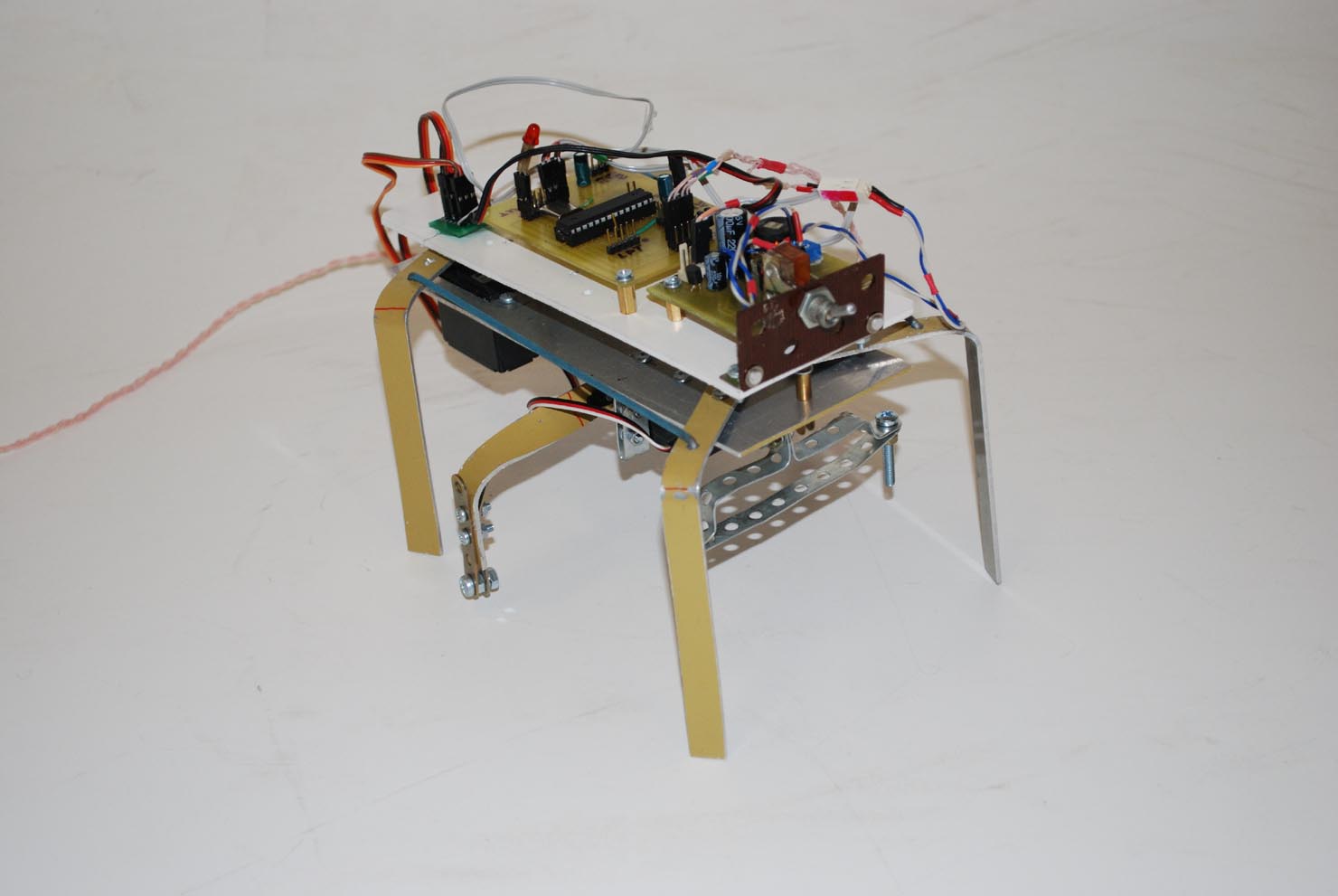
Проект посвящен механике шагающих роботов и манипуляторов. Созданы экспериментальные прототипы манипуляторов, схвата, ходовых узлов, шестиногий робот "Скорпион".
Видео с выставки "Робототехника-2008":