ПЛУТ-3
Автор:
Описание проекта
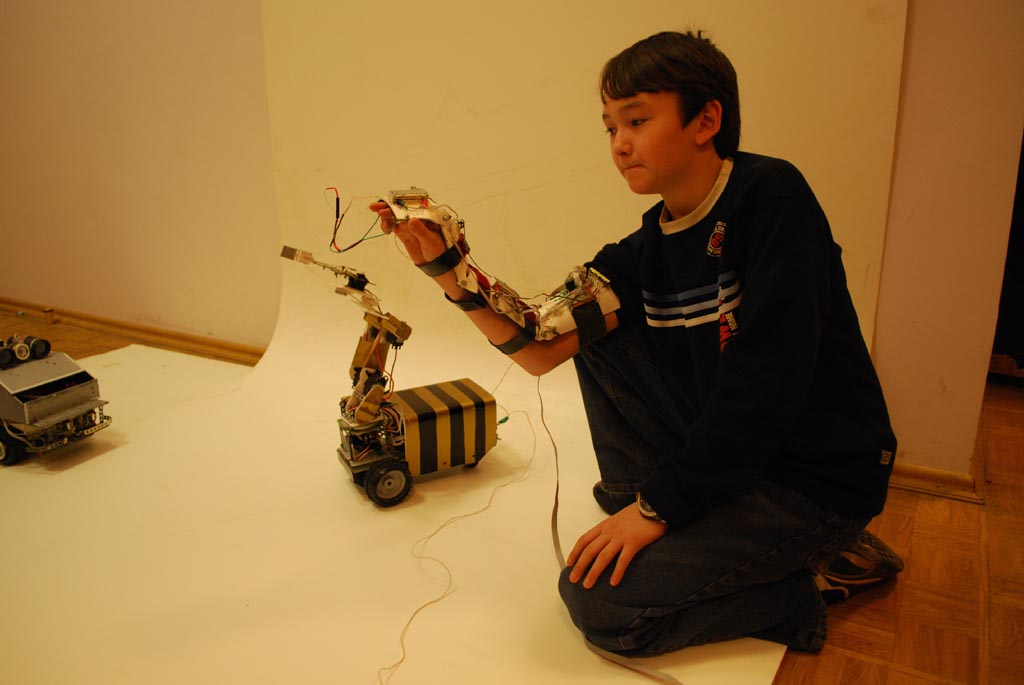
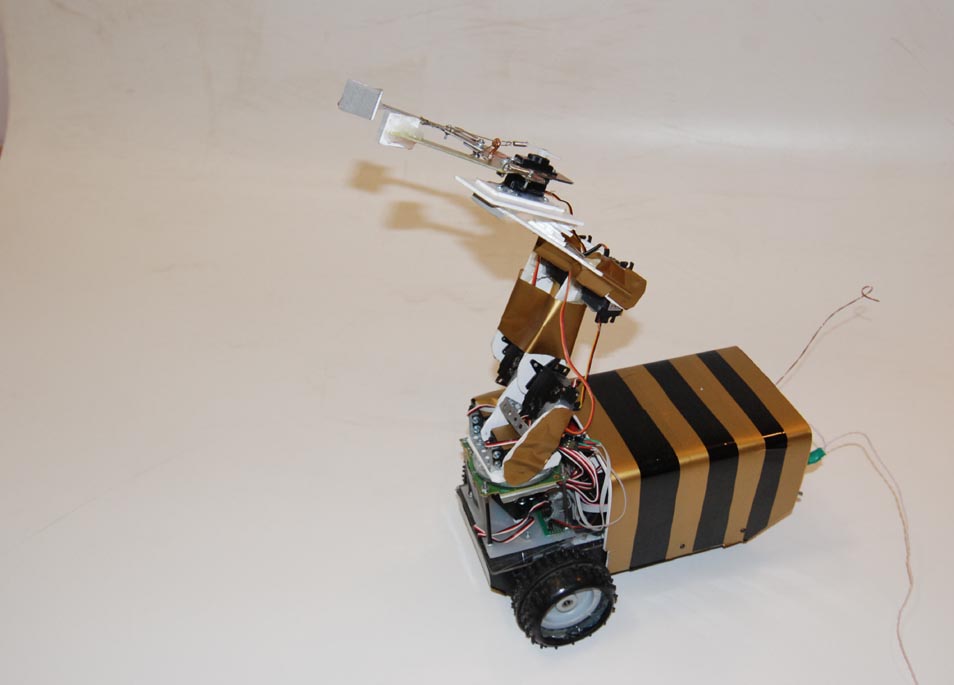
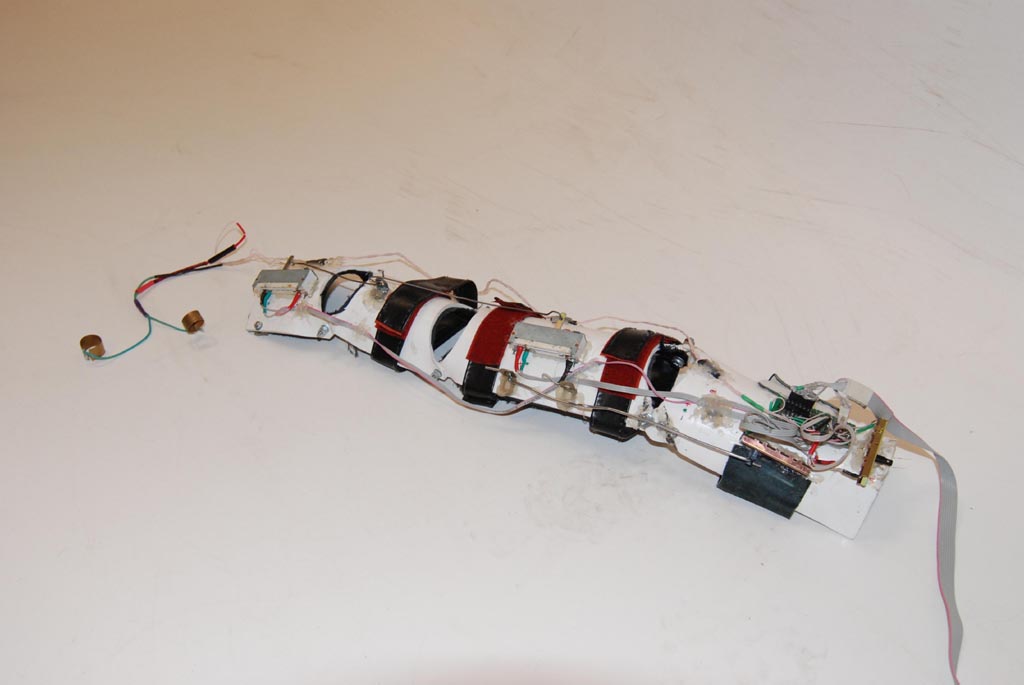
Робот ПЛУТ-3 обладает антропоморфной системой управления. Управление манипулятором осуществляется движениями руки оператора. Положение руки считывается при помощи переменных резисторов. Через АЦП воздействие передаётся на манипулятор.
Статьи
Карпов В.В. Антропоморфная система управления //Фестиваль мобильных роботов, МГУ, 2008 (446Kb, doc)
Видео с выставки "Робототехника-2008":